








Esto debe servir como pequeña guía a replicar mi proyecto más reciente; basados en un Arduino brazo robótico.
Primero apagado me gustaría agradecer la ayuda de usuario de Instructables steveastrouk para me inició en la programación y mi buen amigo Sean Ulrich para pasar 6 horas de depuración esta cosa conmigo que.
A una falta de tecnología no tengo ninguno de los avances fotos de lo contrario esto sería un completo ible, disculpe las molestias y espero que suministro de información suficiente para ayudarle en su camino. Así que vamos a empezar!
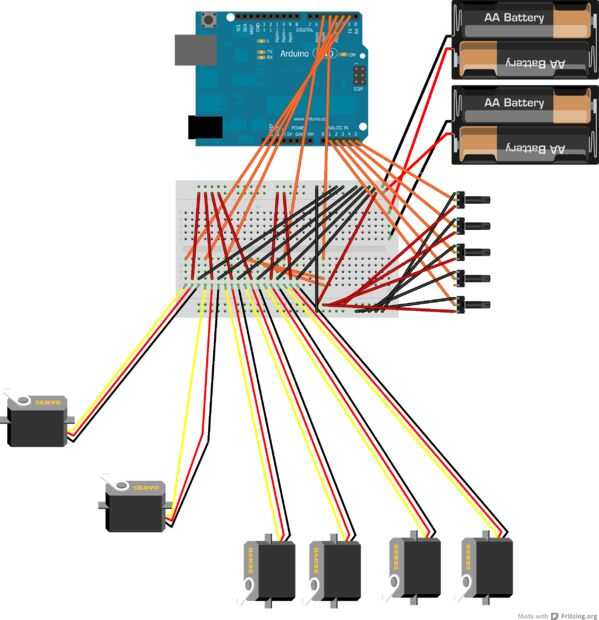
Aquí está una lista de las piezas que utilicé:
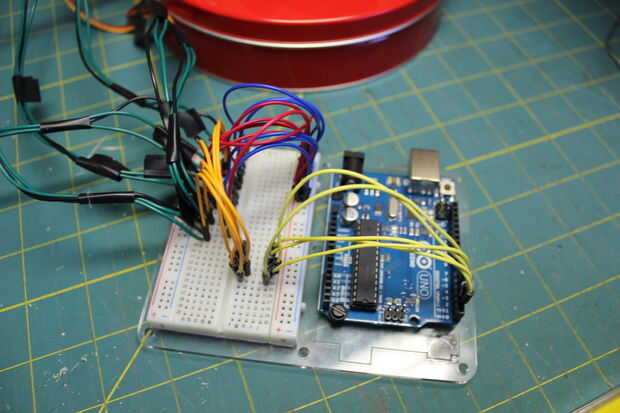
1 Uno de x Arduino
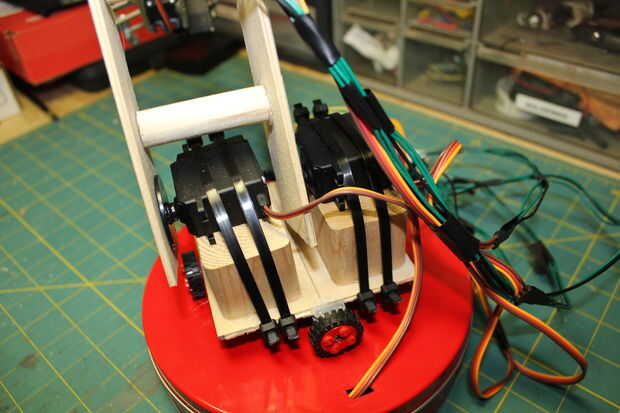
4 x servos grandes
1 x Servo mediano
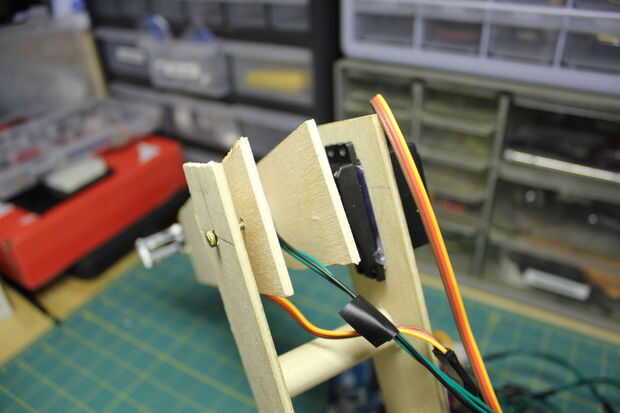
1 x garra robótica
1 x pequeño protoboard
4 x potenciómetro
2 x interruptor
1 x caja de batería de 4 células D (6v)
1 Clip de batería x Arduino
~ 2 pies cuadrados de abedul madera contrachapada 1/8' de espesor
1/2 pulgada diámetro basswood clavijas
2 x 1'x 1'x 3' bloques de tilo
~2.5 libras de granos de plomo
5 x extensiones de cable de servo
Algunos muelle decente para mantener la carga de los servos cuando está completamente extendido
Algún tipo de recinto (usado cajas de la lata que compré en el de Michael)
Y una buttload absoluta de pegamento caliente. El código se adjunta como un archivo txt.
Tome por favor no de las notas en las imágenes para más detalles.
EDIT: Aquí hay un video-













