Paso 13: Control de Motor de perforación
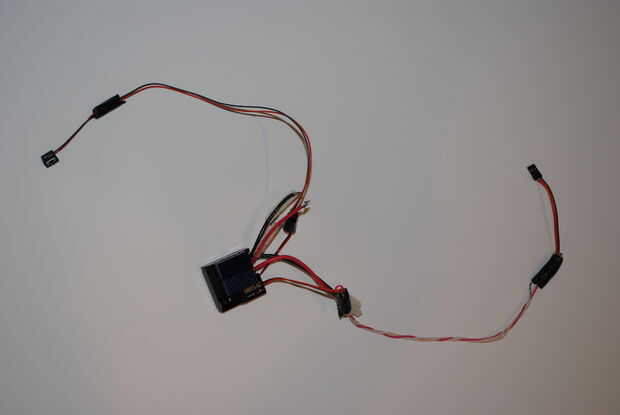



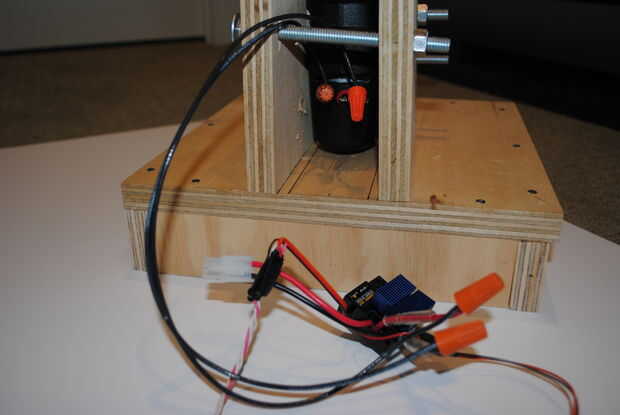
Antes de la ESC para el robot de montaje y conexión de los cables, deben hacerse tres modificaciones:
1. Corte el encendido/apagado interruptor de alambre y soldadura de dos alambres de extensión, apenas como con el motor servo de la garra.
2. el conector Hitec tres de corte y soldadura en tres cables de extensión, como con el motor servo de la garra.
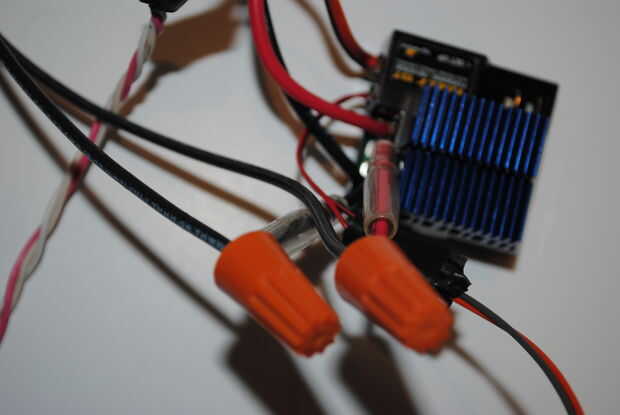
3. Corte las puntas de los cables al motor y tira de ellos, así los tapones de alambre pueden ser utilizados para conectar el motor del taladro a la ESC.
Utilizando tuercas para alambre, sujete los cables conectados a los conductores del motor del taladro a la ESC.












")
