Paso 10: Tres dimensiones cinemática
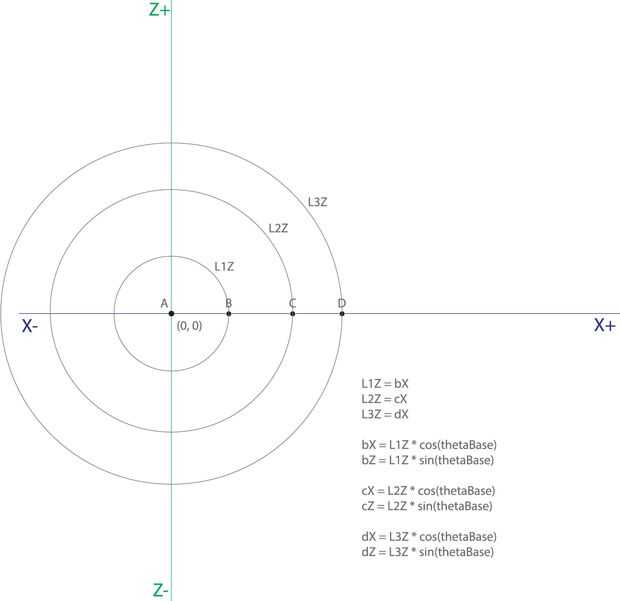
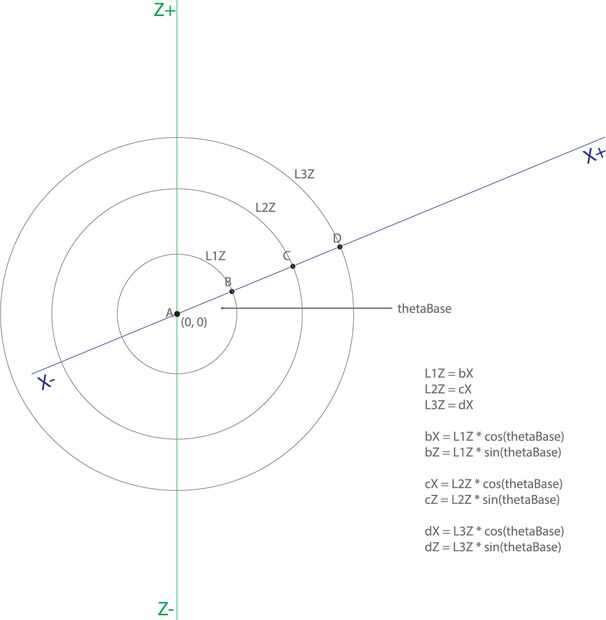
Mientras que el brazo solo se mueve a lo largo de un plano 2D, el base servo gira todos los puntos en espacio 3D. Para calcular las nuevas coordenadas de nuestros puntos comunes, tendremos que voltear nuestra perspectiva. Mirando desde arriba hacia abajo, el brazo se extiende positivamente a lo largo del eje X. Ahora tenemos un nuevo espacio polar donde el radio de los círculos para cada punto es igual a la coordenada X de cada punto en el plano XY. Simplemente lo redefinimos los valores de X como el coseno de thetaBase multiplicado por la longitud de L (N) Z (N es el punto que queremos encontrar. Podemos encontrar el valor Z multiplicando el seno del thetaBase por la longitud de L (N) Z. Con todo juntos, teniendo en cuenta ángulos thetaA, ficha y thetaC puede coordenada de encontrar el 3D de ahora del punto D. Con esto finalizamos nuestro simple matemática cinemática adelante. Ahora a ponerlo a utilizar...



")




")




