Paso 3: Diseñar un brazo Robot
Antes de diseñar los sistemas, planifiqué los aspectos mecánicos del robot, ya que el brazo sí mismo dicta los requisitos para la mayoría de los otros componentes. He navegado alrededor y vieron muchos kits de robots diferentes e incluso unos brazos de robot profesional. Entonces decidí diseñar y construir mi propio brazo "desde cero" por varias razones: era más barato, yo quería aprender más sobre el diseño y construcción de un brazo simple y me permitió tener el control de diseño, que hace las matemáticas necesarias para la planificación de movimiento menos difíciles de resolver.
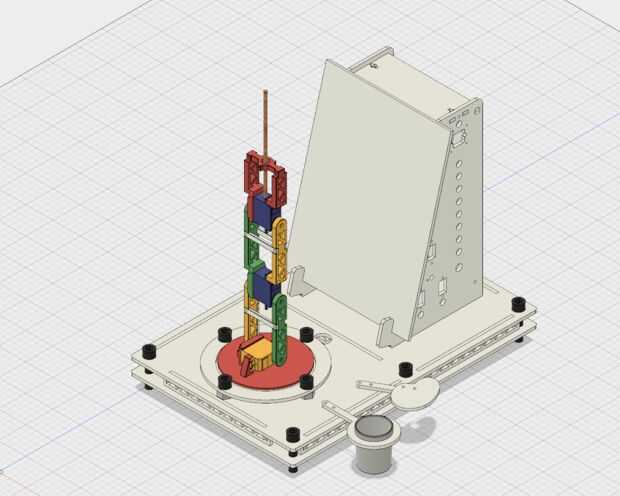
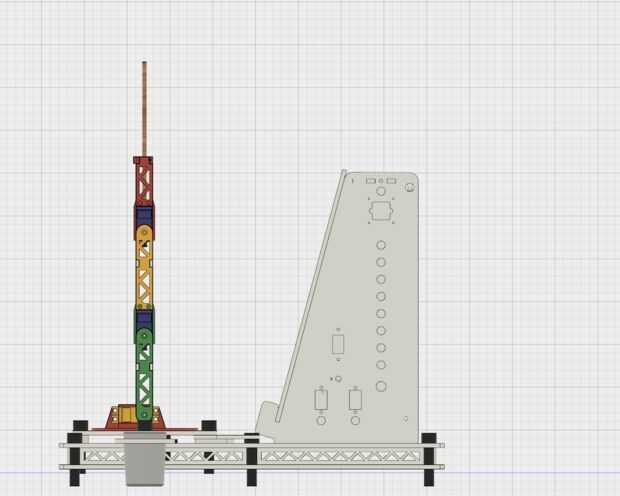
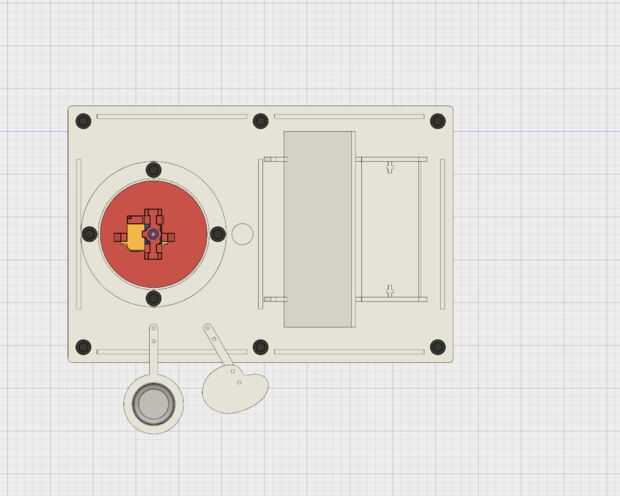
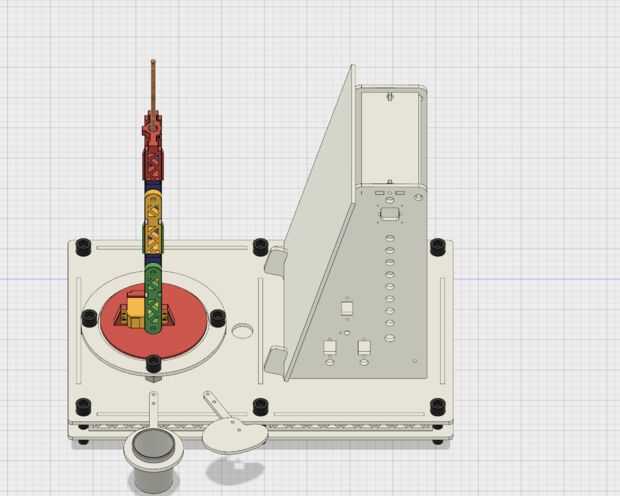
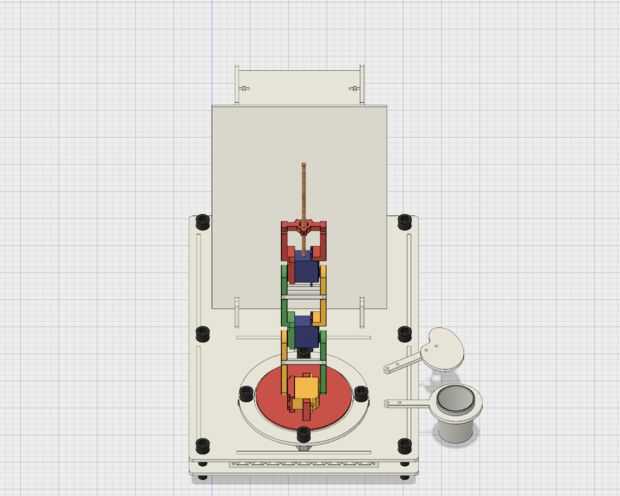
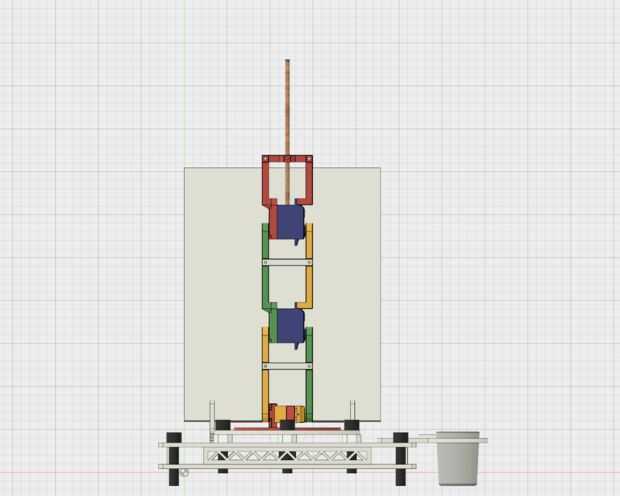
Decidía sobre un diseño de 4 grados de libertad ya que este es el arreglo mínimo necesario para pintar el lienzo vertical mientras sigue permitiendo el brazo a mojar el pincel en la pintura y la taza, de agua que están en el mismo plano que la base del robot. Con esto en mente, hice un modelo bastante detallado de la máquina utilizando Autodesk 360 de fusión (que es un gran programa, gratis para uso de aficionados mientras que todavía teniendo una tonelada de características!).
Para diseñar los componentes que se unen a los motores, primero tomé medidas muy finas de uno de los servos y había creado un modelo 3D. Me decidí por tener dos puntales que se extiende desde cada motor como esto impediría torcer mayoría como el brazo se movió. Tengo acceso a algunas impresoras 3D muy precisas en el trabajo, por lo que pude para el diseño de los puntales en cuernos servo directo y las tapas como reemplazos de la cubierta de la base de cada motor. Yo quería aprender más sobre el diseño de los brazos robot, utilizando las herramientas que había hecho más sentido en mi caso. Al hacer su propio brazo, solo necesita saber las dimensiones y las limitaciones de sus motores. Diseñé los puntales a ser bastante corto. Esto sirve dos propósitos: reducir la carga en los motores y reducir el tiempo de impresión de cada pieza. Diseñé los puntales que recortes triangulares, material del ahorro sin sacrificar integridad estructural. Diseño completo control también me permitió crear el brazo tal la punta del pincel (mi efector final) es totalmente centrado con mi eje base. Esto hará que las matemáticas para controlar el brazo menos complejo (más sobre esto más adelante).
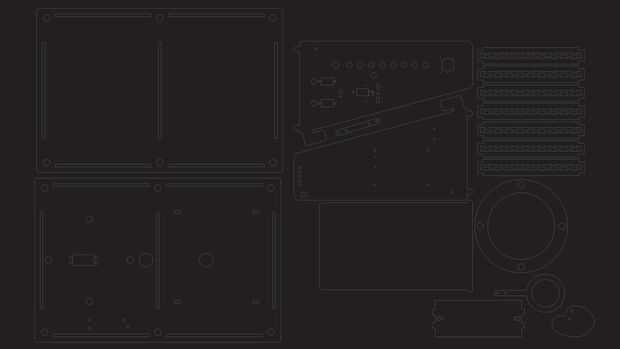
He diseñado la estructura del robot a partir de piezas de corte por láser de contrachapado de 6mm, como resultado, el marco consiste en piezas totalmente planas que tienen agujeros para el montaje estructural y componente con fines de montaje. Para obtener las trayectorias de mi modelo, I el marco individual de objetos seleccionados y exportados como caminos. El marco está diseñado para acomodar 9 "x 12" x 1/4" lienzo.



")




")




