Paso 5: Diseñar el caballete
Caballete:
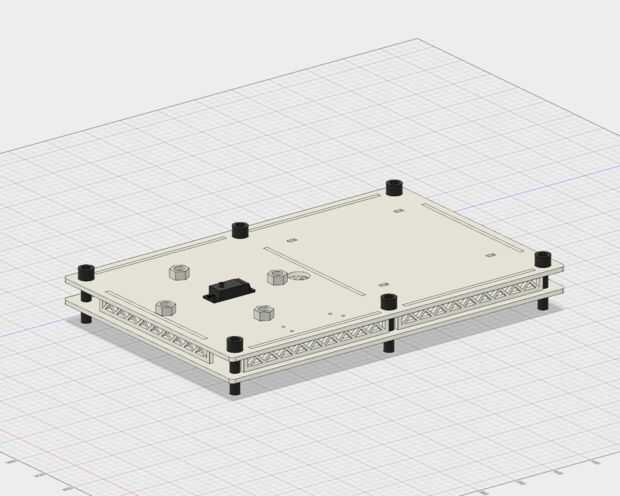
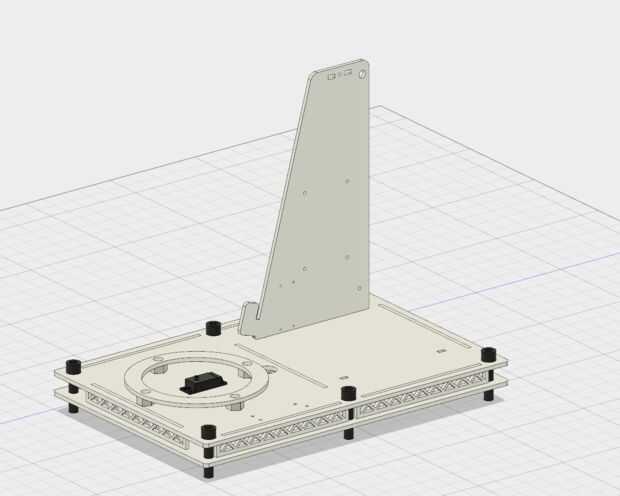
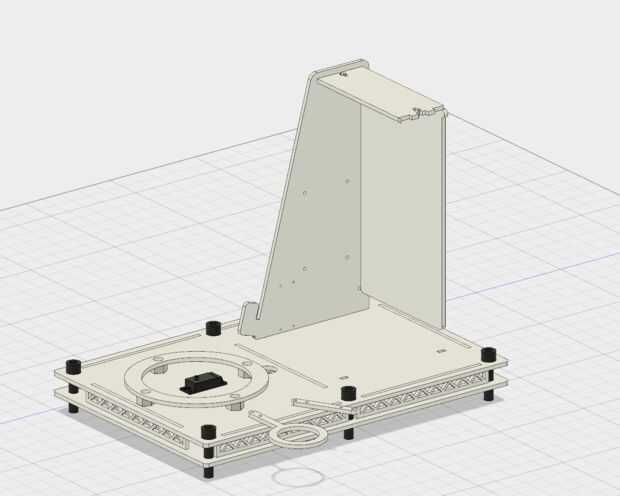
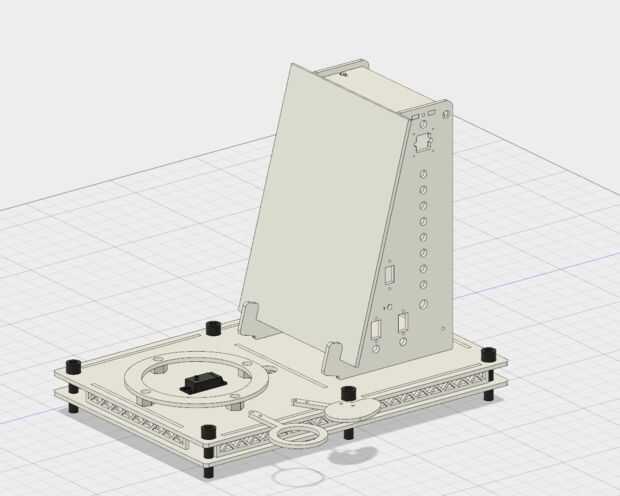
Diseñé la caja caballete para servir varios propósitos. Además sostiene un lienzo en una distancia fija y ángulo del brazo, proporciona un espacio de montaje para ocultar la electrónica. La Junta de controlador Intel Galileo y PWM es atornillada a la placa del lado trasero con tornillo M3 y M2 respectivamente. El avance hacia la placa ofrece un espacio de montaje para la electrónica del interfaz de usuario y la cámara. La cámara está conectada mediante cuatro tornillos de M2 hacia arriba. Los agujeros para los LEDs son inserción ligeramente para que pueden aparecen en el panel con ajuste de fricción. El usuario botón y perilla son de montaje en panel, entonces pop en sus respectivos agujeros y apriete con una tuerca cada uno. El poder de dos interruptores están empotrados y boca abajo para que puedan girarse fácilmente y prevenir cualquier desconexión accidental (que le hará daño el robot). La parte posterior de la base es una puerta con una bisagra hacia arriba.



")




")




