Paso 7: Diseño Descripción: electrónica

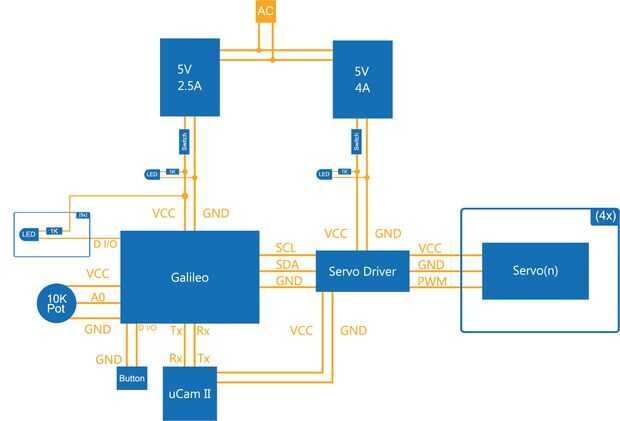
El Galileo es el corazón de este sistema, no sólo porque se ejecuta el programa, pero también es el mayor componente eléctrico individual. Diseñé el sistema eléctrico de tal manera que utiliza varón a las conexiones hembra encabezado a cada componente o módulo. Con este esquema pudo reducir al mínimo la huella electrónica (que generalmente se manifiesta en protoboard grande pcb) y además permitir el rápido montaje y cableado durante la instalación y pruebas de los componentes individuales. En última instancia, no uso todos los componentes montados sobre el funcionamiento final del robot.
El esquema adjunto es más diagrama de bloque que el verdadero esquema ya que la mayoría de los componentes utilizados son módulos completos (Galileo, PWM controlador, cámara y servos). Los componentes discretos que elegí no están realmente esenciales para el funcionamiento del robot, aunque hicieron depuración un poco más agradable a la vista.
El sistema funciona de dos fuentes de alimentación de 5 voltios: uno de lógica y uno para la alimentación del motor. Desde que Galileo estaría haciendo un montón de procesamiento de precisión, cualquier ruido eléctrico de los motores sería aceptable. La cámara es bastante baja potencia y cada LED tiene resistencia limitadora actual ohmios de 1 K, por lo que la lógica corriente absorbida debe ser fina de la 2,5 unidad suministra ingenio Galileo. Los motores reciben un suministro de 4A 5V carnosos por lo que casi no hay posibilidad de ellos baja en corriente.
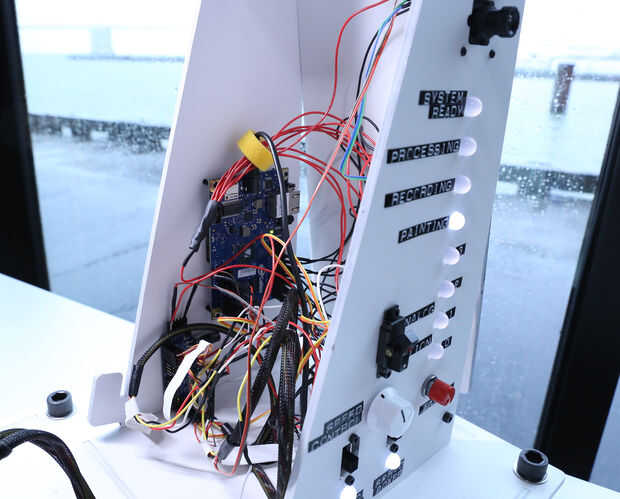
La principal "interfaz de usuario de" realmente sólo consta de un potenciómetro y un botón de pulsación momentánea. Elegí un panel algo carnoso montar botón puesto que hizo un sólido clic al pulsar. El potenciómetro es útil para calibrar las posiciones motor antes de la final del programa.



")




")




