Paso 8: Diseño Descripción: Software
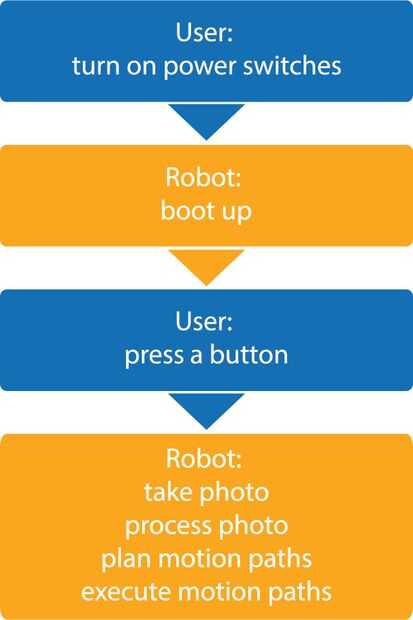
El gráfico anterior muestra el último proceso de interacción entre el usuario y conseguir una foto. Por supuesto, esto se simplificaron enormemente demasiado, pero cubre la base de lo que hace la máquina. Para llegar a este punto, tendremos que ejecutar tres programas: captura de control de motor, punto de destino pre-procesamiento y código de tiempo de ejecución principal. Mucho comenté todo mi código, así
Captura del Control del motor:
He utilizado servos regular de manía, que significa que no podía recibir cualquier retroalimentación directa con respecto a su posición, además, no es posible alinear el engranaje de salida perfectamente al cuerno. Para encontrar el largo pulso que corresponden a la posición deseada del servo, necesitaremos confirmar visualmente que los servos movieron correctamente.
Punto de tratamiento previo:
La matemática necesaria para calcular la ubicación de la posición deseada del brazo robot es muy memoria intensiva y requiere el uso de una computadora de escritorio completa. Puedes leer más sobre esto en el paso de simulación.
Tiempo de ejecución:
Una vez hemos ejecutado aunque los dos programas anteriores, el Galileo ahora es capaz de correr a través de su secuencia de pintura completo. Este código espera que el usuario pulse el botón de disparo, con lo cual el sistema toma una foto, la foto dicho proceso y luego utilizar los datos procesados para determinar una secuencia de trayectoria de movimiento para pintar los píxeles en la lona.



")




")




