Paso 12: Reflexiones finales y mejoras


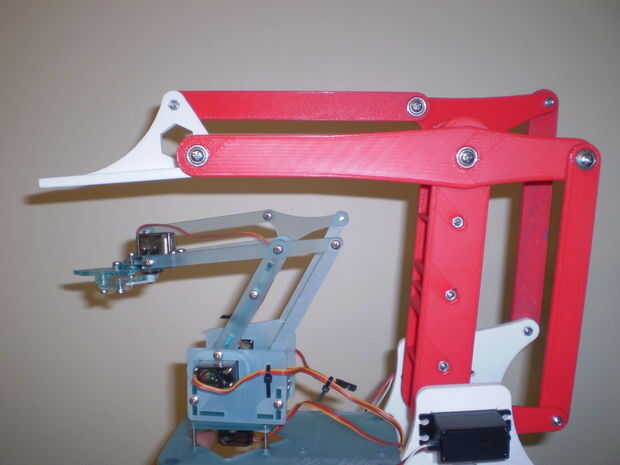
Cuando el brazo es super fuerte y rígida. Todas las articulaciones moverse fácil y no hacia donde fuera. El original tenía un alcance de 7" el mio es 14". He añadido algunas patas de acero para el lastre y se ve media. Algunas personas en comparación con una araña mal. No tengo una pinza activa como original porque estoy utilizando un electroimán. Si se utilizo a una pinza creo que cambiaría el diseño tiene más dedos o usar a la garra de Robot Universal DIY.
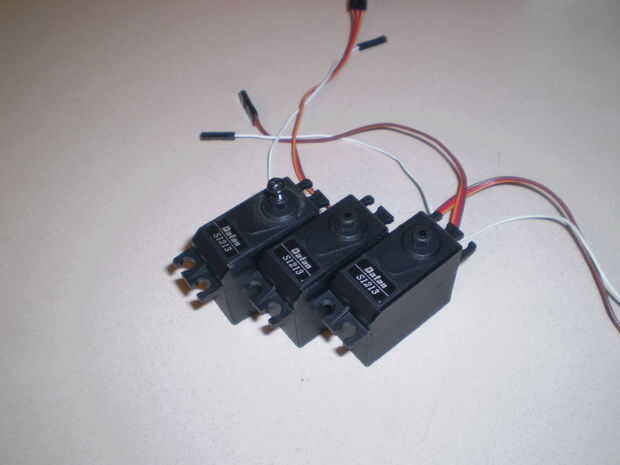
Avería del servo:
Los servos que he fotografiado son de adafruit.com y tienen un cable extra de realimentación de posición. Iba a usar para un brazo de aprendizaje (movimiento que por mano y registrar el movimiento y reproducir). Pero los servos no eran lo suficientemente fuertes como para mover el brazo cuando está completamente extendido. Así que cambié a un alto esfuerzo de torsión los polou.com que puse en la lista de piezas. Ellos no han llegado aún así que estoy emocionado de ver cómo se hacen. La compensación es no tienen retroalimentación sin brazo de aprendizaje para mí. Creo que si me quitan algunos del plástico de la viga de centro que los servos originales podrían funcionar.
Cambios que haría si construyo otro:
- La base limita viaje total por lo que quitaría los lados frontales y posterior.
- Actualizar el radio en todas las piezas coinciden (cosmético)
- Cabeza intercambiable de pinzas para sujetar a pinzas diferentes
- Manejo de cables construido en el modelo
- Piernas más fuertes en el stand
- LED de la que
- Reducir el peso de todas las partes mediante la adición de agujeros (en forma de triángulo)
- Una especie de encargado de la cuerda para evitar que los cables de torsión cuando gira
- Creo que utilizando motores paso a paso con engranajes podría añada a la capacidad de peso y rotación de 360 grados en la base. (Podría ser una mala idea, que no sé)
Muchos más cambios pequeños, que todavía tengo que descubrir






")






