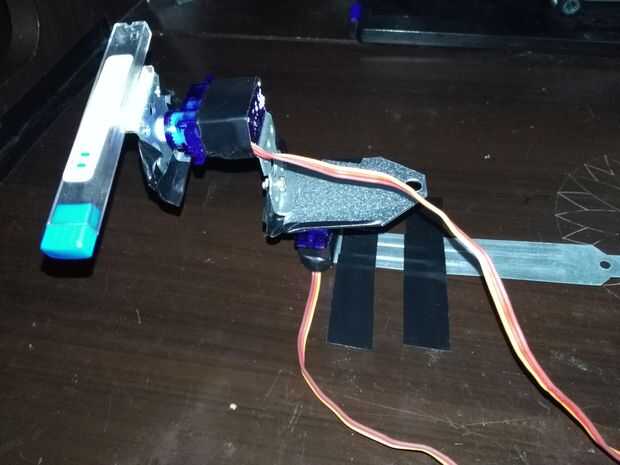
Por lo tanto, en este instructable presento el proceso para hacer un pan de 2 ejes y brazo de servo controlado usando el MPU6050 de la inclinación
acelerómetro.
En primer lugar tenemos que subir los archivos i2cdev.zip y MPU6050.zip en la biblioteca de la IDE de Arduino.
Esto puede realizarse extrayendo los archivos en las carpetas ZIP y copiar en la carpeta Librería de arduino IDE.
Las piezas necesarias para este proyecto son:
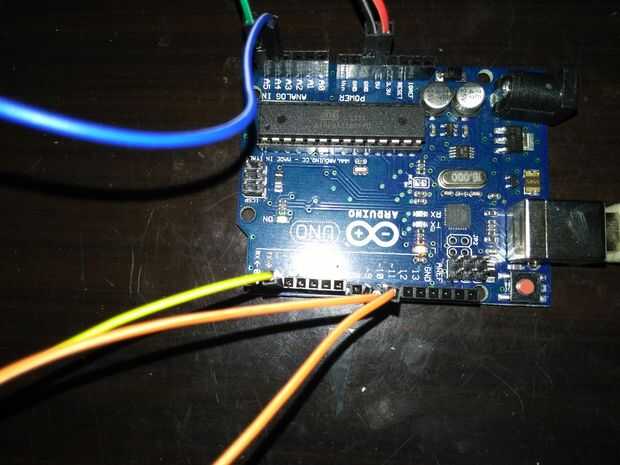
1) Arduino UNO
2) tablero de
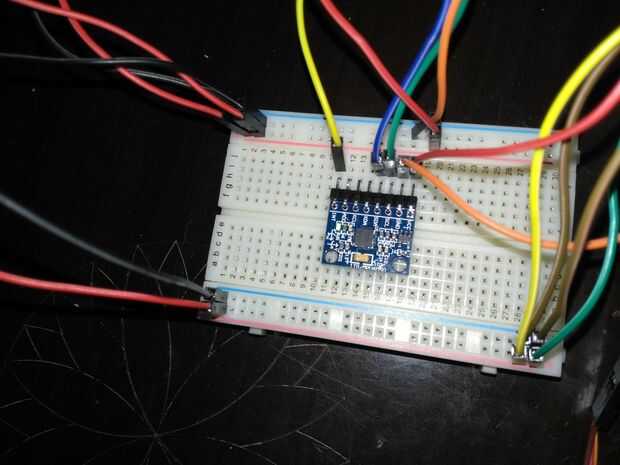
3) MPU6050
4) 2 x motores servos (en este caso utilicé microservo motores)
5) cables de puente macho-macho
6) computadora con el IDE de Arduino
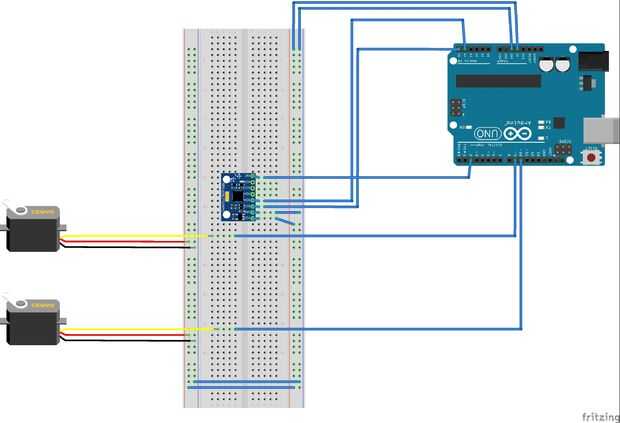
Las conexiones deben realizarse como se muestra en el diagrama de Fritzing.
Para MPU6050:
SCL -> A5
SDA -> A4
INT -> 2
Servo1 -> 9
Servo2 -> 10
Después de efectúan todas las conexiones, cargar el código en su Arduino:
#include "Wire.h"
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Servo.h"
MPU6050 mpu;
int16_t ax, ay, az;
int16_t gx, gy, gz;
Servo1 servo;
Servo servo2;
int val1;
int val2;
int prevVal1;
int prevVal2;
void setup()
{
Wire.Begin();
Serial.Begin(38400);
Serial.println ("Initialize MPU");
MPU.Initialize();
¿Serial.println(MPU.testconnection()? 'Conectado': "Conexión fallida");
servo1.Attach(9);
servo2.Attach(10);
}
void loop()
{
mpu.getMotion6 (& ax y ay y az y gx y gy y gz);
val1 = mapa (hacha,-17000, 17000, 0, 179);
Si (val1! = prevVal1)
{
servo1.Write(val1);
prevVal1 = val1;
}
val2 = mapa (ay,-17000, 17000, 0, 179);
Si (val2! = prevVal2)
{
servo2.Write(val2);
prevVal2 = val2;
}
Delay(50);
}
Nota importante: puede haber problemas de conexión MPU6050, como los cables de mantener funcionando perder, así que cuando usted inicialmente subirla, compruebe en el monitor serial si el acelerómetro fue conectado con éxito. Otro reconecte y vuelva a intentarlo.
Consejos: Puede agregar más servos introduciendo nuevas variables y asignar en consecuencia. Adición de servos más de gran alcance y una mejor estructura puede abrir nuevas posibilidades como un montaje de cámara fpv etc.
Siempre listo para la retroalimentación.
Gracias.













