![]()
![]()
![]()
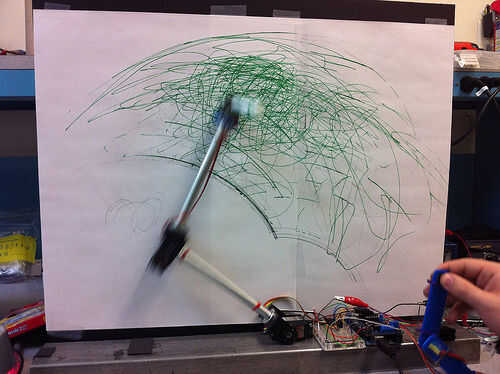
parte de mi investigación de doctorado en Universidad de Nueva York-Poly consiste en predecir el consumo de energía en sistemas robóticos, así que necesitaba un sistema robótico para trabajar con una plataforma de investigación para validar los resultados. Así que convencí a mis compañeros de grupo en mi clase de Mecatrónica en el otoño de 2011 que debemos construir un brazo robótico. También quería usarlo como un proyecto para aprender el control del motor. Tuve algunos
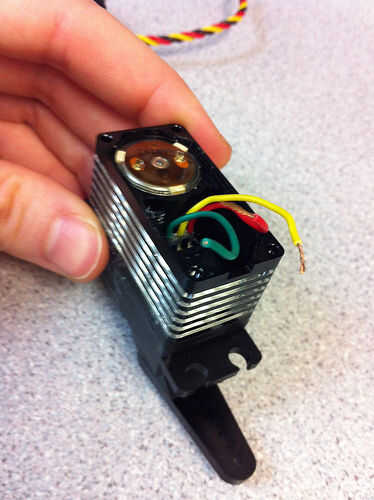
servos de alto torque mentira alrededor de otro proyecto, pero el control tableros habían sido fritos. Puesto que un motor de servo es sólo un motor de corriente continua, algunos engranajes y un potenciómetro integrado, podría utilizar aquellos si fue frito sólo el tablero de control. Por lo tanto, desenroscar la tapa inferior y usa alguna trenza desoldadora para aspirar la soldadura alrededor de los dos bornes del motor.
Entonces era capaz de sacar el PCB. Sin embargo, los 3 cables desde el potenciómetro todavía fueron atados, así que los corte y terminó con algo que parecía esto:
También había visto este post en Instructables por Chris Anderson en la adición de algunos potenciómetros a un brazo robótico de juguete para habilitar el control de lazo cerrado. Desde que me decidí a trabajar con estos servos hackeados, mi potenciómetros ya integraron, así que me puse. Quiero compartirles el proceso para que puedas empezar un poco más alto en la curva de aprendizaje que hice.
Mediante la construcción de un brazo robótico, los estudiantes adquieren habilidades de montaje y poder implementar base cinemática directa e inversa en el simple código de Arduino.





")








