Paso 2: El esquema
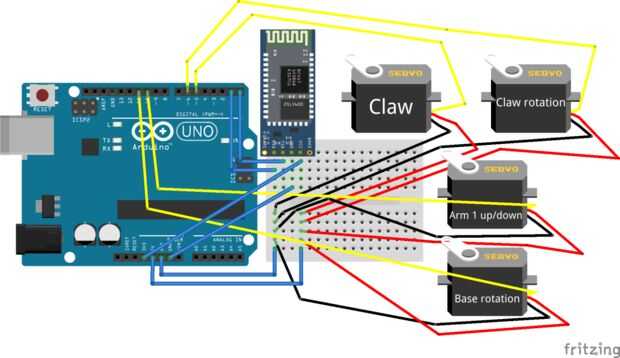

Aquí está el esquema que tienes que copiar en tu protoboard.
Si el esquema es así coufusing aquí se explica mejor:
El servo garra es conectado al pin 5
El servo de rotación de garra al pin 6
El primer servo del brazo al perno de 10
Servo rotación base al pin 11
TX a RX
RX a TX
GND a GND
VCC a 3.3v (HC-06)













