Paso 2: Levantar! Vamos a calibrar!
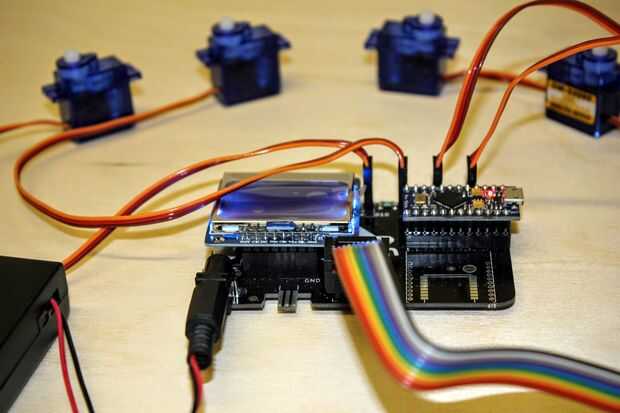


Si tienes el laser cortó sus partes o adquirir uno de nuestros kits te realmente quiere construir. Pero primero debe completar un paso vital. Es necesario calibrar los servos. Aquí vamos a utilizar nuestro tablero de cerebros, que es un Arduino compatible, pero puede usar cualquier cosa que va a generar una señal PWM para calibrarlos. Hay MeArm código disponible para Arduino, Raspberry Pi, Beaglebone Black, Sparkcore y Espruino.
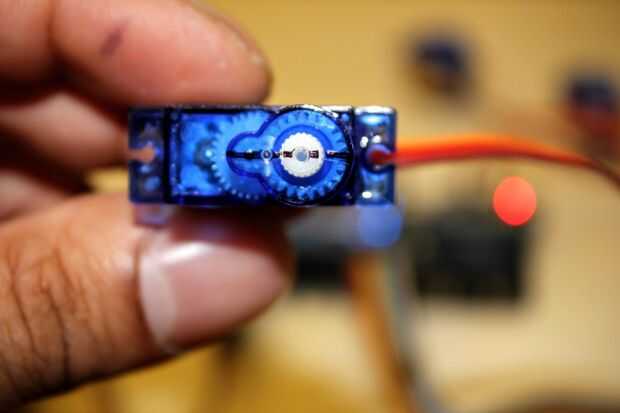
Uso de nuestros cerebros vendrá programada para ir a las posiciones predeterminadas. Que son 90, 90, 90 y 25 para los servos para el centro, izquierda, derecha y agarra la respectivamente. Marque una línea de centro sobre el eje y el cuerpo del servo y usted puede también marcarlos c, l, r y c o por otro sistema que va a significar algo para usted.
No ser tentados para convertirlos a mano, el par suministrado por su poderosa fuerza podría tira los engranajes servo. Por la misma razón de realmente importante que hagamos este proceso antes de construir su MeArm.
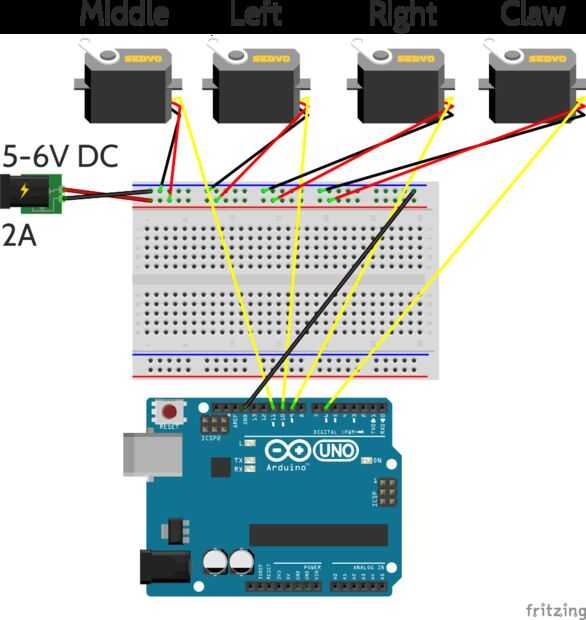
Si estás utilizando Arduino y la configuración que se muestra en la imagen de arriba y este código le dará el mismo resultado. Utilizamos Codebender para nuestro código de demo y le encantaría una camiseta. Así que por favor, use este enlace si vas a abrir una cuenta.
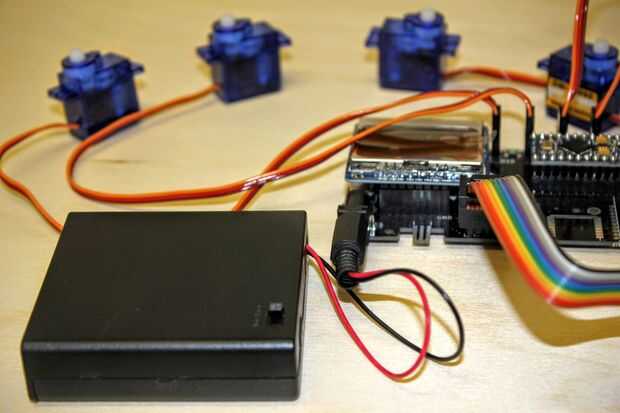
La parte más importante a realizar en la configuración de tus servos es que no eres capaz de poder a través de su microcontrolador. Necesita una fuente de alimentación 2A de independiente 5-6V, con un terreno común para el micro controlador. Si deseas el Arduino configurar la imagen para obtener más información.














