Paso 11: conceptos
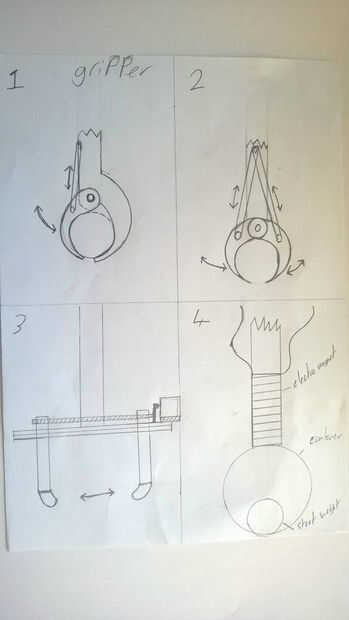
pinza 1
Mi primer concepto es la idea que he decidido usar en mi brazo robot ya que es fácil de construir porque sólo tiene una garra móvil. Y poner en mi brazo robot como puedo usar materiales como el acrílico y jeringas para energía. De discusión con el Señor Richardson le gustaba esta mejor porque miró a la bestia y fue el más simple de todos ellos para construir y pueden ser hecho de materiales disponibles. También si corte la uña para el mismo diámetro que el recipiente naturalmente quedaría juntos para que no tenga que presionar constantemente para mantener la en el contenedor.
pinza 2
Este concepto es similar al concepto de uno pero en lugar de tener una garra móvil tiene dos que hace más fácil recoger el envase y todavía puede hacerse con materiales disponibles pero de jugar con el otro brazo robot que tiene esta idea implementada al usar jeringas al cerrar la pinza de las jeringas se moverían hacia un lado o a otro hacer la garra mal funcionamiento que no mi brazo de robot que tienen el mismo problema asi que he decidido no utilizar este concepto.
pinza 3
Concepto tres he usado la idea de tener un engranaje de gusano / abrazadera de tornillo que daría una muy fuerte hold en el envase pero desde que estoy obligado a tiempo y recursos para poner en práctica esta idea que mi robot brazo ya que tengo que conseguir alrededor de tener un motor suficientemente potente como para aplaudir bien y no tener todo vendar así que he decidido no utilizar esta idea
pinza 4
Concepto cuatro el uso de un electroimán es práctico como no tiene ninguna pieza móvil mecánica pero uno por defecto es que el tubo de metal en el contenedor el contenedor natural rollo cerca del suelo debido a la gravedad así el electro imán no es capaz de llegar lo suficientemente cerca para recoger el contenedor y moverlo alrededor de fiable. Así que he decidido no poner en práctica esta idea.
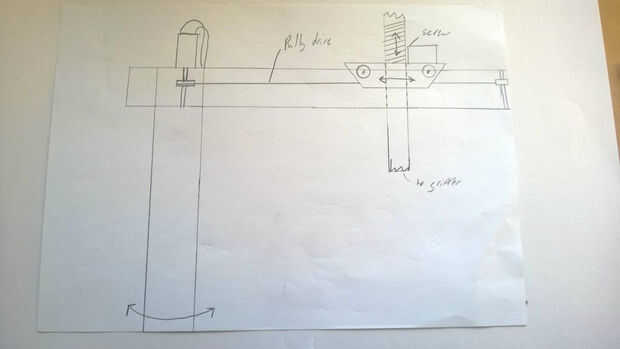
brazo de robot de pórtico
La idea de usar un brazo de robot de pórtico estilo tiene una gran de que el peso del brazo y el contenedor no real tiene que ser levantado y sólo el contenedor se mueve pasivamente pero los defectos principales de este concepto que aunque se pondría menos presión las jeringas que no se moverían lo suficiente y para mi usar cinturón unidades y lo engranajes tardan más en hacer que es más complicado y no son suministrados por la escuela de los recursos disponibles.
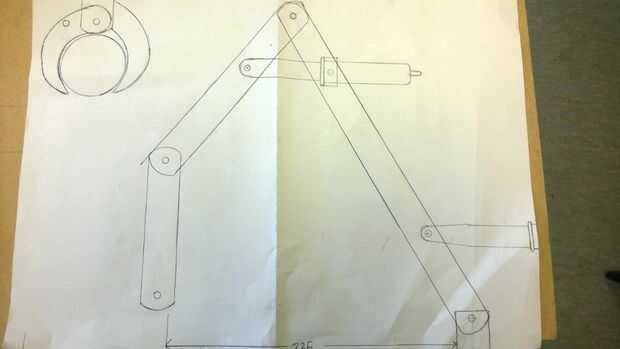
imagen del concepto elegido 3
Este es mi elegido para utilizar en mi build porque le da mucho movimiento a un movimiento pequeño de la jeringa. Para mi garra elegí una garra fija y moviendo uno y tenemos todo el conjunto colgando y usando la gravedad para mantenerlo perpendicular al suelo en todas las etapas del movimiento de los brazos. Para el acrílico principales armas es la más conveniente como es fácil de manipular y es luz pero es bastante fuerte cuando todos juntos a cabo. Para los pivotes de la canal de aluminio es mejor porque es más fuerte que el acrílico ya está en la forma necesaria para mi diseño y es más ligero que el acero. Este concepto cumple con mis especificaciones porque parece un brazo de robot, pueden utilizar materiales disponibles incluyendo jeringas y puede llegar lo suficientemente lejos a la distancia mínima requerida de 350mm.
La razón por la que decidí usar este concepto es porque es capaz de llegar a casi todas las especificaciones por ejemplo...
· Es capaz de alcanzar la distancia requerida y todavía puede venir atrás derecha en
· puede ser hecho fuera de los recursos disponibles se puede realizar fuera de acrílico y jeringas para su control
· tiene un diseño limpio y parece un brazo de robot
· Quepa con mi garra.
· Después de la desecación con el Sr. Richardson que decidimos ir con esta idea y tienen la garra colgar libremente por lo que como se mueve el brazo hacia fuera él permanecerá perpendicular al suelo.













