Paso 2: Primera tarea de investigación

Estos son los contenedores peligrosos que el brazo del robot debe recoger son 110mm de largo y 54mm de diámetro.
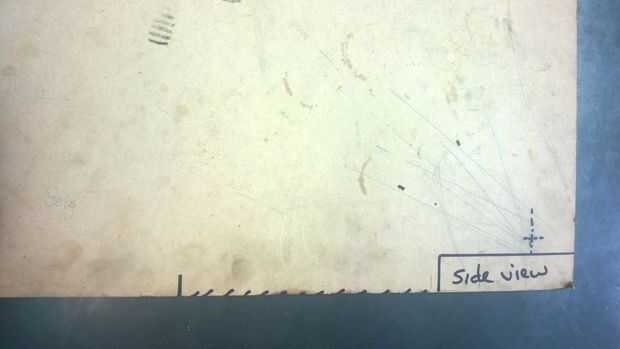
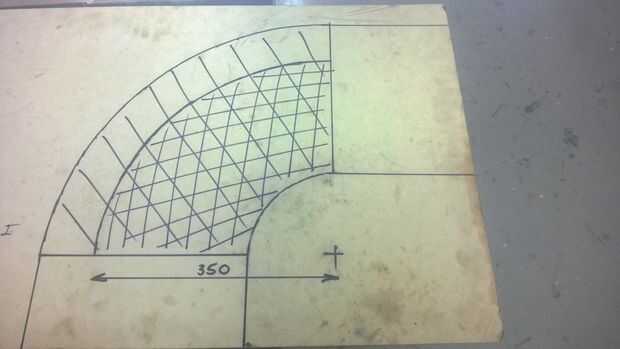
la vista lateral de la distancia que el brazo necesita alcanzar y la pone hacia fuera el brazo del robot debe moverse en el área Resumen es la cantidad mínima que ha de moverse. La distancia desde el pivote es de 350 mm.













