Ya que es mi primer proyecto después de los 15 tutoriales de mi kit de iniciación de Arduino, el verdadero propósito de la misma es para algunos críticos, consejos, sugerencias, ideas de cualquier persona que sabe más que yo.Este proyecto trata de un
Este Instructables se explica el proceso de construcción de un tanque autónomo de Arduino con un brazo robótico conectado a controlarse a través de bluetooth usando la aplicación Ardudroid Android.La dirección se controla mediante teclas mientras los
Actualización: añadido esquema, parte superior capa PCB, fondo capa PCB y ambos arriba, imágenes de PCB inferiorAl terminar el "RevIO" - un clon de Arduino que tiene la diferente manera de exponer el uso de pernos. Decidí ir más lejos el próximo
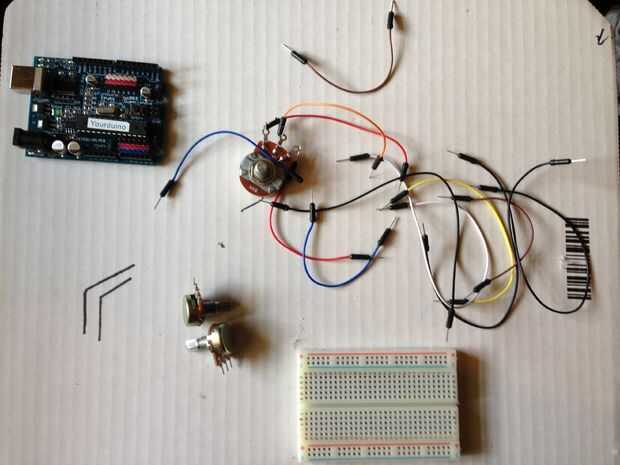
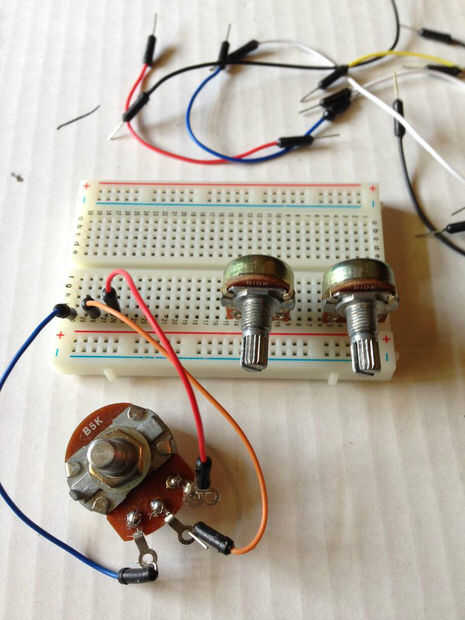
el brazo robótico agarra un objeto después de que detecta con el detector de movimiento y luego se mueve en un lugar específico.lista de partes:1,3 servos2. detector de movimiento infrarrojo pasivo: http://www.sparkfun.com/products/86303. arduino uno
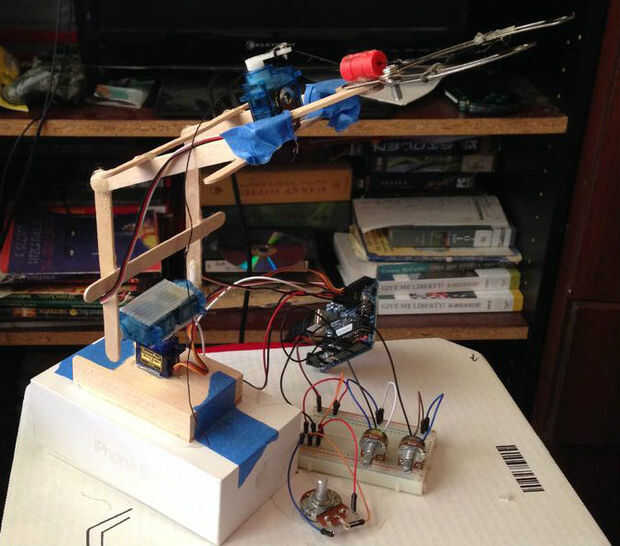
Esto pretende ser una guía de cómo construir un brazo robótico de Arduino. Su concepto es ser barato y fácil de construir. Esto es sólo un prototipo para optimizar mi código, pero es perfecto empezar con la robótica Arduino. Es controlado por un joyp
Un brazo robótico es responsable de procesos muy complicados que requieren una programación rigurosa y compleja, soy un estudiante de ingeniería electrónico y he siempre me llamó la atención estos proyectos por lo que decidí "Quiero construir un braz
el brazo de Edge robótico OWI es un barato y buenísimo 5-grado-de-libertad robótica del brazo que sólo cuesta $37. Es un gran kit para construir con un niño y no tomar más de un par de horas para terminar. Fuera de la caja, sólo puede ser controlado
Usted puede controlar el brazo robótico remotamente usando muchos métodos inalámbricos y alambre para hacer muchas tareas como sostener cosas y puede utilizarse en muchas aplicaciones médicas como la cirugía y manteniendo micro herramientas que no se
Siempre decimos, Dobot es una alta precisión, múltiples brazo robótico escritorio de control. En instructables pasado, hemos demostrado usted la alta precisión y la función de escritorio construyendo un laser de corte y soldadura brazo Dobot. En este
Me jubilé hace poco y una de las cosas que me prometí fue que cuando me retiro que iba a completar todos los proyectos que tenía corriendo dentro de mi cabeza desde que era adolescente. Es cerca de 50 años o tan de los proyectos. En aquellos días no
BRAZO de axioma fue diseñado por Sergei Dines: Ingeniero mecánico Senior en USF (Tampa).LinkedIN: http://www.linkedin.com/in/sergeidinesSitio web: http://www.surgerobotics.com/Correo electrónico: sergeidines¡¡Nuevo!! : Versión acortada visita: http:/
Estamos de vuelta con otro tutorial para mostrar cómo convertir PHIRO Pro en un brazo robótico móvil fresco que puede elegir y poner cosas! Similar a nuestra anterior PHIRO Arduino Color sensor instructable, vamos a utilizar Código de bolsillo en un
DIY Robot brazo robótico impresora 3D Plotter dibujar marco casero con Motor paso a paso 22 PC paso a paso Motor montaje L soporte de montaje para Motor paso a paso 571 PC de aluminio aleación 90 x 12 mm 250 mm2 PC paso a paso motor 1.8 degrees4 de 5
En este artículo que te mostramos cómo utilizar 1Sheeld y tu Android smart teléfono sensores (orientación y proximidad) para controlar un robot brazo de forma inalámbrica.Breve sobre 1Sheeld:http://1sheeld.com/Paso 1: Nuestras herramientas 1 - brazo


")








![BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo](https://foto.askix.com/thumb/170x110/a/73/a73fe094730384e00961d770d1d63f61.jpg "BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo")


