Paso 3: electrónica:
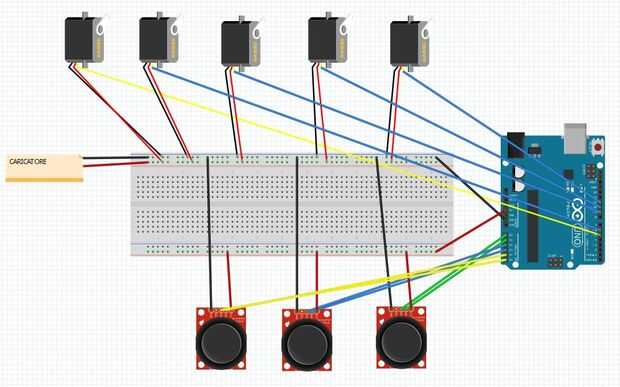
El cableado es el mismo como se muestra en la imagen o el archivo fritzing:
servos de la señal a los pines: 5-6-9-10-11 y eje de la palanca de mando a los pines analógicos: A0-A1-A2-A3-A4
El principal problema que tuvo fue que los joysticks tenía a suministrarse por el Arduino, no por el cargador que uso para los servos. De lo contrario el servo solo iría loco moviéndose al azar de un lado a otro.
Yo creo que puede ser porque si suministrarlos con el cargador, el Arduino no podrá decirle precisamente la diferencia de potencial cuando me muevo, pero entonces otra vez: soy muy nuevo en electrónica por lo que es sólo una suposición.
Conectando la tierra del Arduino y la tierra de cargador a la protoboard ayudó a prevenir movimientos inesperados y al azar, por un motivo similar de los joysticks la fuente me supongo.

")







![BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo](https://foto.askix.com/thumb/170x110/a/73/a73fe094730384e00961d770d1d63f61.jpg "BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo")



")