Paso 4: Viviendo en la mejora:
Puesto que cada palanca de mando puede controlar 2 servos (1 por eje), necesito 3 servos para controlar el brazo entero, pero por desgracia solo tengo 2 pulgares.
Así que pensé que, en lugar de controlar cada servo, podía controlar sólo xyz posición de la empuñadura y abrir-cerrar el agarre, para un total de 4 ejes, 2 joysticks y 2 pulgares!
Me enteré que ese problema es conocido como cinemática inversa, también descubrí que es todo menos fácil.
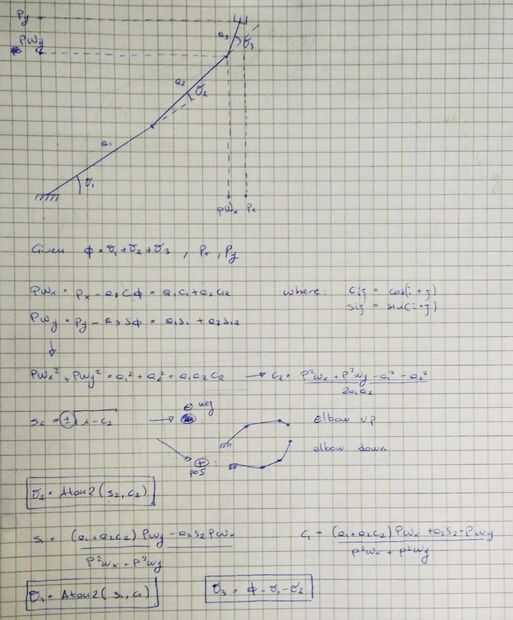
La idea es escribir ecuaciones (no lineales) para encontrar el estado de cada efector (ángulos para los servos) da la posición final.
He subido un documento escrito a mano con las ecuaciones, y actualmente estoy trabajando para un nuevo código para usarlos. No debería ser demasiado difícil, básicamente tiene que leer los joysticks, utilizar sus lecturas para modificar las coordenadas xyz de la empuñadura y luego darles a mis ecuaciones, calcular los ángulos de servos y escribirlas.

")







![BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo](https://foto.askix.com/thumb/170x110/a/73/a73fe094730384e00961d770d1d63f61.jpg "BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo")



")