
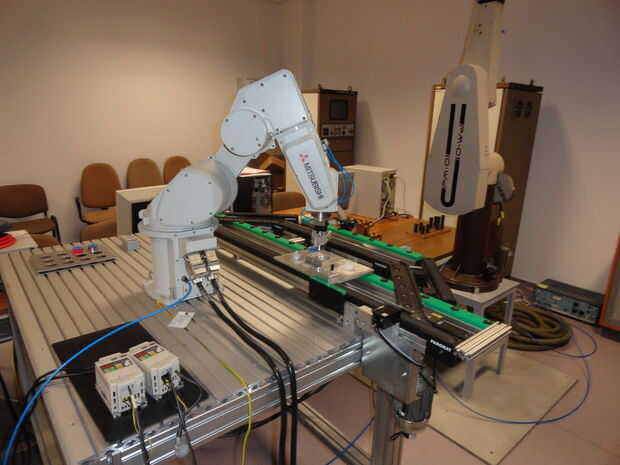
Este es un proyecto donde diseñó y construyó una estación de trabajo a un grado seis de brazo robótico de la libertad. Es un ejemplo común de una línea de producción, que la pieza de trabajo es viajar en una transportadora o paleta a la estación de trabajo, donde detiene en una posición fija, y toma el brazo del robot sobre la terminación del procedimiento de allí. Mi objetivo principal era hacer experimentos, si el brazo robótico es lo suficientemente preciso para piezas de trabajo de la Asamblea en se mueven sobre una banda transportadora. Este conjunto de "on-the-go" (u otras tareas industriales) no se utilizan ampliamente en la industria todavía, pero serán en el futuro.
¿Cómo funciona?
Hay un incremental encoder en el lado inferior del motor del transportador, que le da la información a la unidad de procesador principal del brazo robot, para poder calcular la velocidad real y el desplazamiento del transportador.
En el lado de la cinta transportadora, hay varios sensores de proximidad inductivos, que pueden detectar la paleta de aluminio, al pasar por ellos. Con esta información, la pinza del brazo robótico puede seguir la paleta con la misma velocidad, y es capaz de hacer todo el trabajo de la Asamblea (o cualquier tarea le dio). La velocidad de la cinta transportadora es regulable con dos convertidores de frecuencia. La paleta se puede parar en varios puntos con el tapón neumático, y vuelve a su posición original con la ayuda de un selector de forma neumática.
No construí todas las partes de la cinta transportadora, como base he utilizado partes de un antiguo transportador desmontada (que fue utilizado en una fábrica de Nokia para adquirir altavoces en eg. 3310 celulares :)). El codificador, la paleta y otras partes que he hecho manualmente y por supuesto, la programación, que era el trabajo más duro! :)
Puedes ver aquí la estación de trabajo, en hacer una tarea de montaje simple con sólo el 30% de la velocidad máxima.
http://www.youtube.com/watch?v=W-lj-y5idF0
Estoy ahora en el tema de 3D de impresión y planea comprar un alimentador de filamento, extremo caliente y el inyector (partes de una impresora 3D de plástico) y ponerlo en la cabeza de la pinza de robot. De esta manera puedo tratar de Imprimir objetos de gran tamaño (el tamaño máximo de ~ 1, 2 m * 0, 8 m). Mayo sería muy bueno ampliar esta cabeza con un ventilador de computadora, por lo que probablemente el filamento plástico se enfriar muy rápido y sólo una fundamentación muy pocos se necesitarán en el objeto impreso.
Por supuesto se trata de sólo un experimento, porque puedo usar robot de mi universidad solo en un tiempo limitado :)

")



")






