






El brazo:
Este instructable muestra el proceso de construcción de un brazo robótico utilizando servos, microprocesador de Arduino, un giroscopio y sensores múltiples de la curva.
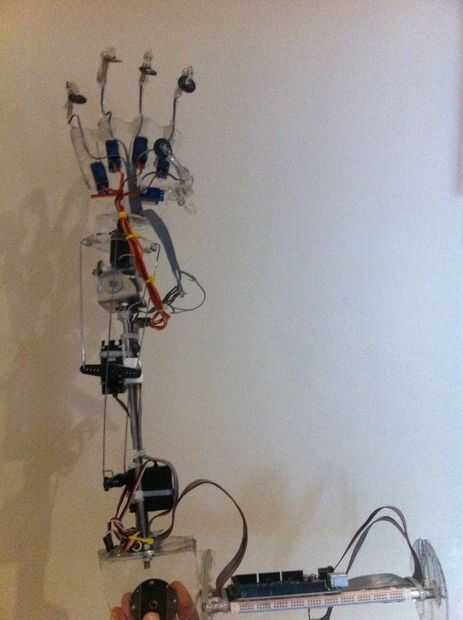
El usuario lleva un guante que contiene los sensores de giroscopio y de la curva que traducen el movimiento de la mano de los usuarios en movimiento de los servos, a su vez girando la muñeca y la mano del brazo robótico.
El antebrazo tiene movimiento completo de una muñeca humana a saber: rotación, desviación radial (movimiento hacia el pulgar), desviación cubital (movimiento hacia el dedo meñique), flexión (inclinación hacia la palma) y extensión (inclinación hacia atrás de la mano).
La mano también tiene movimiento de los dedos, esta queda limitada por el material frágil.
Todo movimiento es proporcionado por los Servos conectados a un cable de extensión o alambre de piano. Cada uno tiene diferentes par dependiendo de su posición.
Los dedos contienen resistores sensibles táctil que proporcionan retroalimentación háptica y permiten al usuario saber cuando los dedos han captado un objeto.









 con pfodApp")



