Paso 2: Electrónica para el brazo
Utilizamos un Arduino Nano para los cerebros de este proyecto, alongwith un módulo Bluetooth HC-05 comunicación y un Buck LM2596 regulador módulo para proporcionar energía estable a los servos, Arduino y el módulo de Bluetooth.
No es aconsejable manejar los servos desde el regulador de energía insignificante para el Nano, un movimiento brusco puede crear una oleada actual y puede restablecer el nano.
Utilizamos un servos estándar SG90 con engranajes de nylon, cheapely disponible en cualquier hobby DIY o tienda de RC.
La energía fue proporcionada por una fuente de alimentación de 9v corriente desde el enchufe de pared.
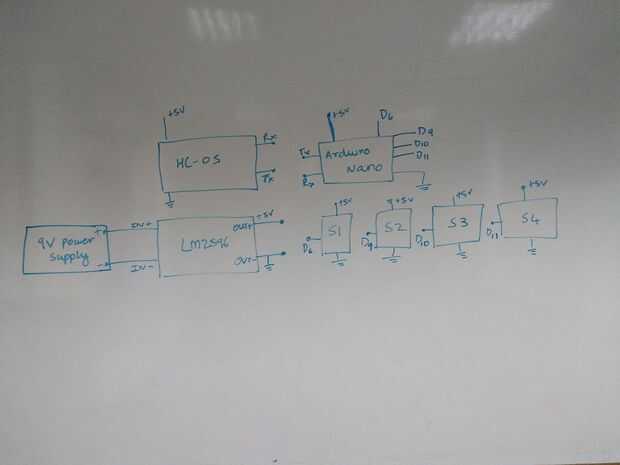
Por favor ver adjunto la imagen para las conexiones entre todos los componentes anteriores.
En la foto de arriba, S1, S2, S3 y S4 son los servo motores. Mapas de estos pueden encontrarse en el código.
Código para el brazo puede ser accesada aquí https://github.com/CuriosityGym/EEZyBotArm/blob/ma...








 con pfodApp")



")
