Paso 4: Guante interfaz Arduino
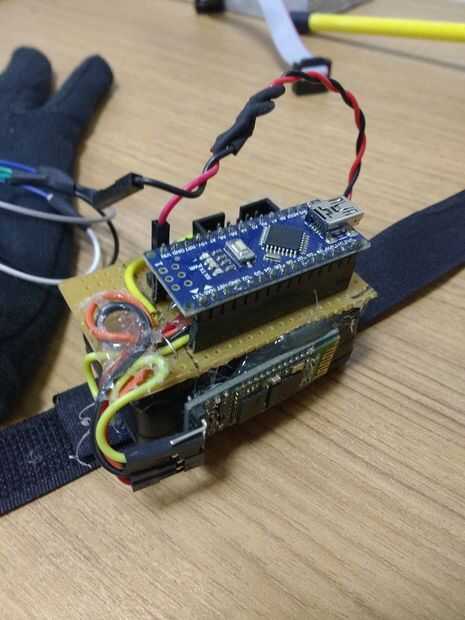
El conector de 10 pin FRC fue utilizado para conectarse a Arduino para que fue atado con correa en la muñeca de la persona controlando el guante.
Pines del conector FRC conectan la IMU y los sensores de flexión para las interfaces I2C y analógicas del Arduino.
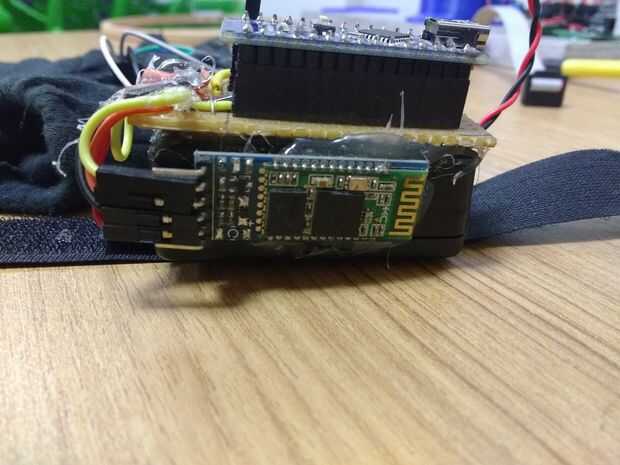
Un Bluetooth HC05 se conecta a la Arduino que transmite información sobre orientación IMU y Flex sensor magnitud de curva a través de Bluetooth para el brazo robótico.
Código de la interfaz de guante puede ser accesada aquí https://github.com/CuriosityGym/EEZyBotArm/blob/ma...
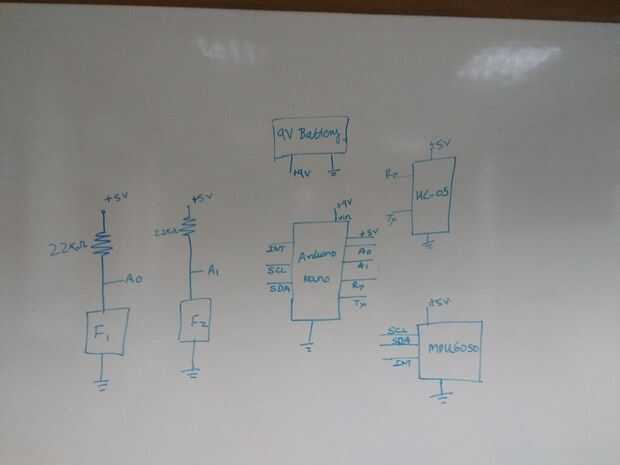
Por favor ver adjunto la imagen del esquema para el guante.
El http://www.technotroniks.com/jugaad/bluetooth-hc-05-to-hc-05-pairing-master-slave/ aquí mencionadas instrucciones fueron utilizados para emparejar los dos dispositivos de HC05 hay ninguna acción de Arduino para emparejar.








 con pfodApp")



")
