Paso 5: Conecte el Servoblocks a los canales de base















En este paso vamos a construir la estructura principal de nuestro brazo robótico.
Vamos a necesitar:
- 4 x cincado tornillos de máquina de cabeza
- 8 x 6-32 tornillos de cabeza Phillips (usted necesitará diferentes tamaños)
- La base de pan
- El 2 Servoblocks
- Una llave hexagonal y un destornillador de estrella
- A 90 grados cuádruple eje Monte C
Un canal de Actobotics de aluminio de 15"
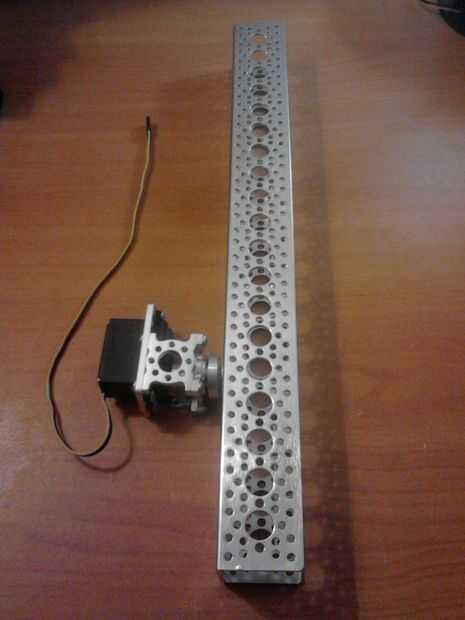
El primer paso es colocar el Eje cuádruple Monte C a un Servoblock con 2 tornillos de cabeza Phillips. Luego conecte el Servoblock a canal 9" de la base con 2 tornillos de cabeza Phillips.
El segundo paso es colocar el canal de aluminio de 15" a la segunda Servoblock con 2 tornillos de cabeza Phillips. Luego conecte el Servoblock en el canal 12" de la base también con 2 tornillos de cabeza Phillips.
Último paso es atornillar el Cuádruple eje montaje C de la Servoblock que está conectado al canal 9", a los 15" canal con 4 tornillos plateados.
Echa un vistazo a las fotos de arriba para entender mejor la estructura de agujero. Permite continuar al siguiente paso.












")
