Paso 8: Conecte a la pinza en el brazo









Permite conectar a la pinza para el cuerpo principal del brazo.
Vamos a necesitar:
- La garra
- x 8 cincado tornillos de máquina de cabeza
- Una llave hexagonal
- A 90 grados cuádruple eje Monte C
- Una placa de tornillo cuadrado grande Actobotics
- Un canal de Actobotics 6" aluminio
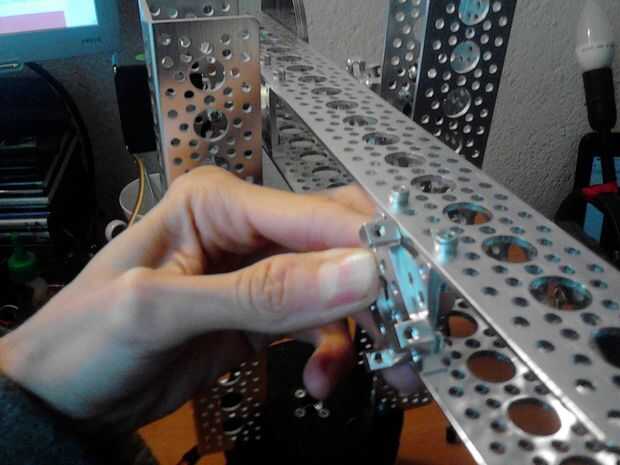
Primero debe conectar el Cuádruple eje Monte C al otro ejemontaje del canal 15". Esto puede hacerse con 2 tornillos de cabeza. No te olvides de conectar en ángulo.
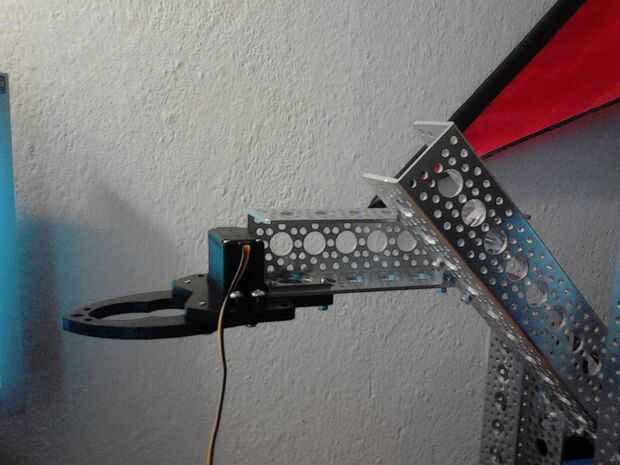
Segundo el s. canal de 6", la garra, la placa de tornillo cuadrado y 4 tornillo de máquina de cabezaponer la placa dentro del canal y desde el exterior poner a la pinza. Conectarlos con los 4 tornillos.
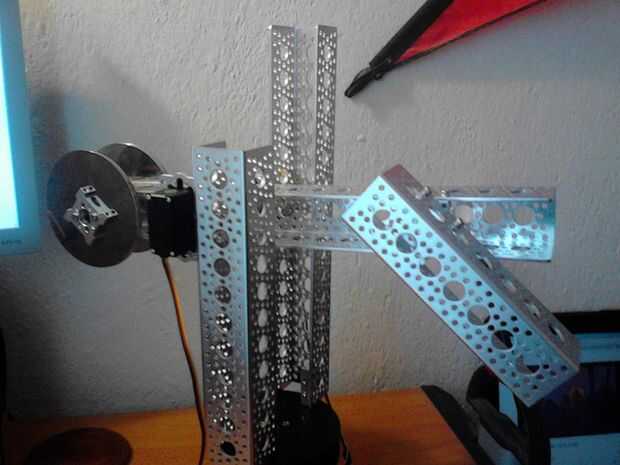
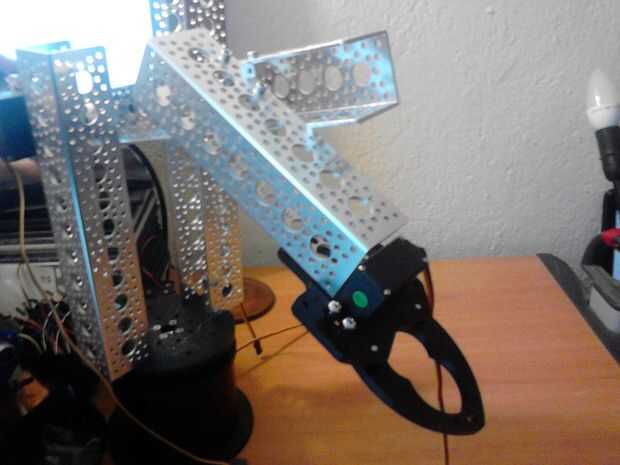
Por último pero no menos importante, fije el 6" el canal de la pinza a la Cuádruple eje montaje C de la 15" canal con 4 tornillos de cabeza.
Perfecta!!!!!! Nuestro brazo robótico está ahora terminado y listo para trabajo. Permite continuar con los últimos pasos.












")
