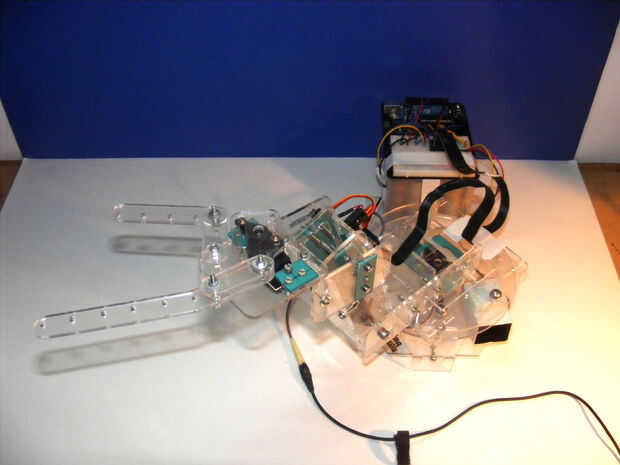
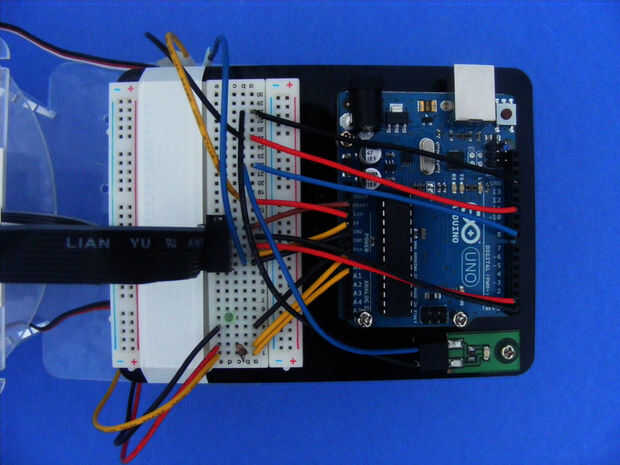

lista de partes:
1,3 servos
2. detector de movimiento infrarrojo pasivo: http://www.sparkfun.com/products/8630
3. arduino uno R3 Junta
4. micro maestro 6 canal servo controlador: http://www.pololu.com/catalog/product/1351
5. LED de detección de confirmación.
la razón por la que he utilizado el controlador de servos es porque con ella puedo controlar la velocidad y la aceleración para los servos.
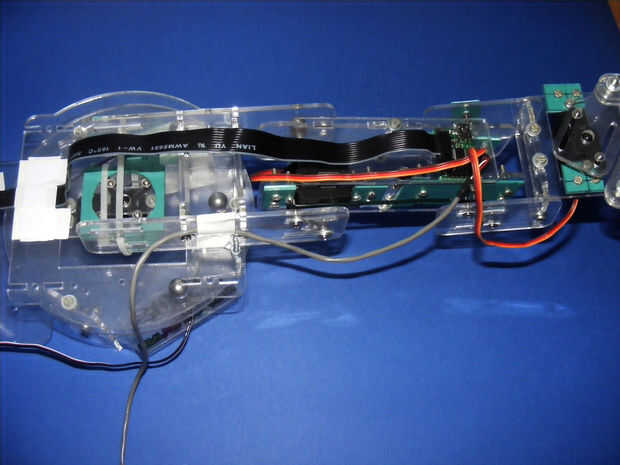
Aunque en el video que publiqué son 4 monitoreo programs(panels), realmente esos 4 son exactamente iguales con sólo una diferencia, el ángulo de visión. Por lo tanto, el brazo robótico es controlado por una plataforma de arduino uno, y con cualquier movimiento que envía a través de TTL(serial-usb) un código específico que es recibido por el programa gráfico de proceso bruja lo analiza y mover el brazo virtual después de uno real.
Este es el video que hice:
http://www.youtube.com/watch?v=KMp_ws_b23E
Asegúrese de que usted Compruebe hacia fuera.
Si se necesitan ver o usar el código que hice, el arduino y el procesamiento, o tienes alguna pregunta, estaré encantado de responder. solo me dejan un mensaje.












")
