Paso 3: Cableado hasta la Arbotix-M
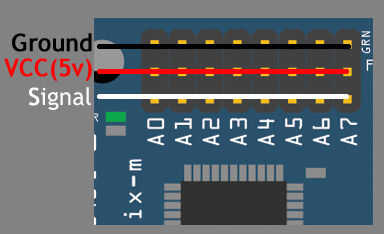

Conexión a la Junta Directiva se realiza con cables de jumper de 3 pines. Cada unidad requiere 1 cable excepto la palanca de mando, requiere 2 cables. Es importante notar donde suelo se encuentra en cada unidad cuando se conecta a la placa. Tierra se nota G en la entrada-salida de RobotGeek.
A0: Palanca de mando Vertical
A1: Joystick Horizontal
A2: Regulador analógico (se trata de la altura)
Regulador analógico de a3 (esto será para la pinza)
A4: Maneta de rotación
A5: Kit FSR (esto será el sensor de presión alta)
A6: Kit FSR (esto será el sensor de presión de fondo)
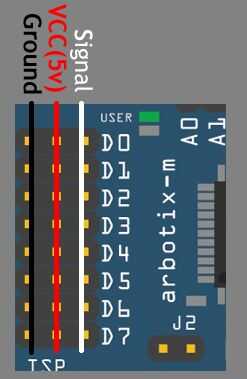
D0: pulsador
D1: LED driver
D2: LED driver
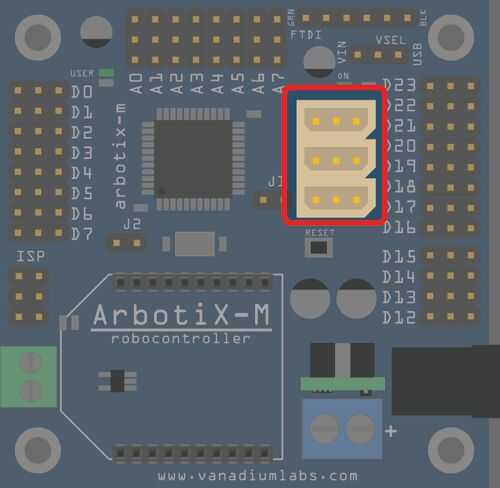
3-pines del puerto DYNAMIXEL: Servomotor 0
Puerto FTDI: FTDI para cable USB (para programación unicamente)
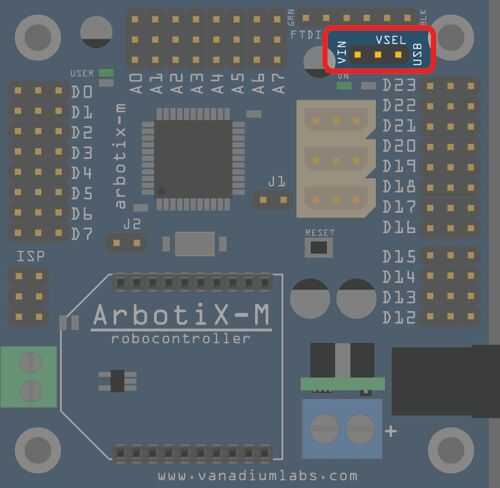
Es importante saltar J1 y J2 y el puente de selección de alimentación deben ajustarse a VIN a tomar el poder de la fuente de alimentación.

")











