Paso 1: Motor y engranaje elección
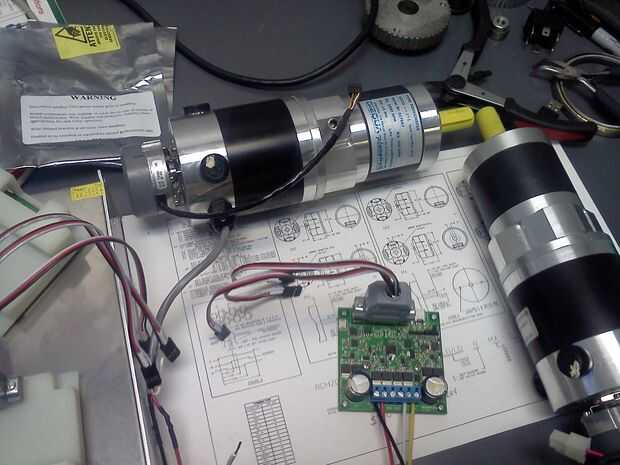
Esta fotografía muestra dos de mis motores con un controlador. Los motores como mencionan arriba fueron comprados en ebay por 30.00 cada uno. Son motores cepillados y correr en pico de 60 voltios. hasta 8 amperios. Estos son motores estables fuertes perfecto para el trabajo. Algunas cosas que necesita tener en cuenta al construir cualquier eléctricamente accionado dispositivo conducido por los motores. una es la tensión de plan sobre el uso de esta se mete en las fuentes de energía disponibles. Tienes poder alimentar su creación una vez que se construir. Elegir 60 voltios de corriente continua ya que fácilmente pude encontrar una fuente de corriente continua para ellos, o si es necesario construir uno yo mismo. Voy a mostrarles la fuente de alimentación más adelante. También necesita considerar el tamaño del eje del motor. Esto es importante porque tienes que ser capaz de encontrar un sistema de reducción engranajes todavía capaz conveniente y de bajo costo para el robot.
Opté por usar una reducción de 10 a uno encapsulada en un acuerdo planetario. Esto me da ahorro de gran espacio como una energía eficiente hacia fuera con características de buen torque. Estas en la foto se encontraron en internet y nuevo me costo 150.00 cada uno. Elegir sabiamente al seleccionar su sistema de engranaje de reducción o unidad. Me equivoqué cuando elegí estas unidades debería haber sido 30 a 1 no 10 a 1 como resultado que necesito agregar un sistema de fuelle para contrarrestar el peso extra para evitar usar los motores y la quema hasta la fuente de alimentación. Le mostraré cómo he podido arreglar este problema con muy poco esfuerzo, aunque a veces tienes que rodar con los golpes para hacer el trabajo. Mi solución fue sencilla pero elegante y eficaz. Voy a instalar el sistema de fuelle una vez que reciba las piezas que he pedido debería estar aquí la próxima semana más o menos.
El último elemento que se necesita para tener en cuenta al escoger un sistema de transmisión es no sólo el motor y la transmisión pero el sistema de retroalimentación debe ser abordado. Todos los sistemas de robóticos móvil necesitan retroalimentación si no no se saben donde están en relación con un punto conocido, esto es clave para el control de cada eje. Tengo un codificador de cuadratura de cuenta 5000 en cada eje, esto me da con la reducción del engranaje de 10 a uno sobre 400000 cuentas por revolución del eje, y como ustedes saben la resolución más han en su regeneración lazo más exacto el robot va a ser. Puedes ver los codificadores montados aquí en esta foto que se encuentran en el extremo de cada motor con el tapón gris. Renco hace estos codificadores.













