Paso 2: Controladores



¿Una vez que tienes los motores y transmisión y retroalimentación que será tu siguiente elección como para energía y control de estos bebés?
Para estos motores opté por usar un Roboteq motor controlador "COSUDE 2150" este regulador es simplemente impresionante puede controlar dos motores DC cepillado de 50 voltios al mismo tiempo y manejar los codificadores y tiene digital configuración de pines así. por no mencionar la capacidad de almacenar su programa de a bordo así como el control. también viene con el software de configuración muy buena con una suave curva de aprendizaje y algunos del mejor soporte técnico que he tenido. Yo no les recomiendo más. Usted puede encontrar aquí tienen muchos muchos diferentes controladores disponibles para baja potencia alta potencia hay sitio web es:http://WWW.ROBOTEQ.COM cheque hacia fuera no arrepentirás. Estos controladores también tienen usb, serie, analógico y de pulso pulso control habilidades construidos derecho pulg. puede configurar cualquier puerto para correr y digital, analógico y el tener puede transportar así como para la red estos juntos. Ir y obtener el PDF de la Página Web.
Lo siguiente que hice fue construir una cubierta para mi controladores de motor.
para esto usé mi impresora 3D en la foto.
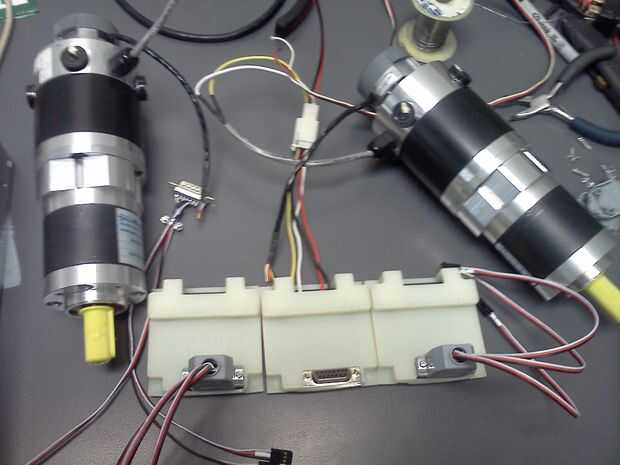
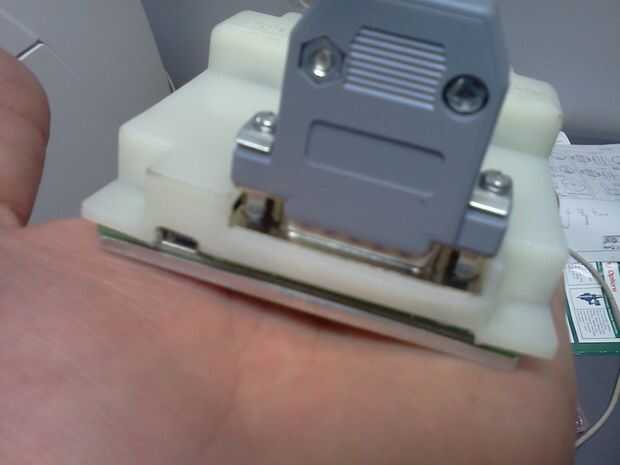
Esta impresora es un regalo del cielo hace mucho más fácil mi vida. Sólo hacer tu parte en sólidos trabajos y enviar a la impresora, eso es todo. puedes ver en la imagen siguiente los tableros de tres regulador con cubiertas de PVC con la impresora. Bueno, cada controlador de unidades de dos motores. total 6 motores 6 eje jajaja para aquellos que anrent bueno en las matemáticas. también se puede ver en la primera foto que muestra los cables del controlador de motor. Hay cerca de mi pulgar. Estas son entradas PWM y una potencia de salida para el RC o radio control. Al igual que los aviones de controladas remotos y coches ves todo el tiempo. Esto viene con cada regulador del motor. Esto es perfecto para mí. Voy a la unidad de cada uno de estos ejes con una señal PWM. Yo le mostrará cómo construir el circuito y soldar las placas para poder conectar mi computadora a los conductores y controlar el robot.













