Paso 5: Análisis de esfuerzo de torsión
La ley del esfuerzo de torsión es T=F.L y la fuerza que en el brazo robótico es su peso W=m.g
pero en la compra de los motores se encuentra la unidad de esfuerzo de torsión (kg.cm) por lo que la ley utilizada en calcula el esfuerzo de torsión es T=m.L , donde m es la masa de la parte y L es la distancia perpendicular desde el eje de rotación del motor al centro de gravedad del cuerpo.
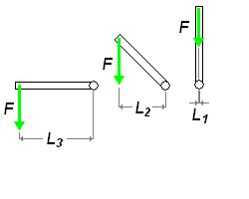
Para determinar la torsión requerida elegimos el caso crítico que el peso del cuerpo hace que el esfuerzo de torsión más grande y elegir motor igual a este par, y ha preferido darle el factor de seguridad igual a 1.5 para movimiento suave sin vibraciones.
El caso crítico es en posición horizontal que da la mayor distancia perpendicular como se muestra en la figura 1 y es obvio que el L3 es la distancia más grande en posición horizontal.
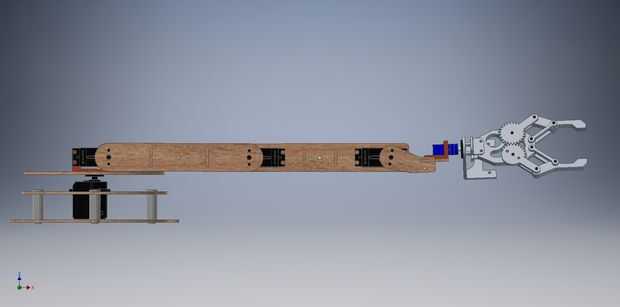
El brazo del robot debe ser en este caso al calcular el par de motores, como se muestra en la figura 2
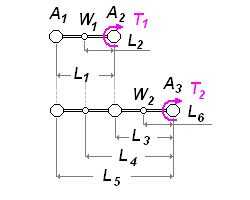
Inicio de Thenwe para calcular el esfuerzo de torsión en cada motor como cuadro 3 y las ecuaciones de este cuadro es:
T1 = L1. A1 + 0,5 L 1. W1
T2 = L5. A1 + L4. W1 + L3. A2 + L6. W2
En este método se considera cada motor como denominen masa y su peso es A distancia perpendicular es de L , por lo que el esfuerzo de torsión provocado por el motor es T=L.A
Y para el esfuerzo de torsión causado por cada enlace que tiene longitud L y masa W T = 0, 5 L. W , y el final par motor es la suma de dos pares y todo lo que precede de pesos (T=L.A+0.5L. W+........)
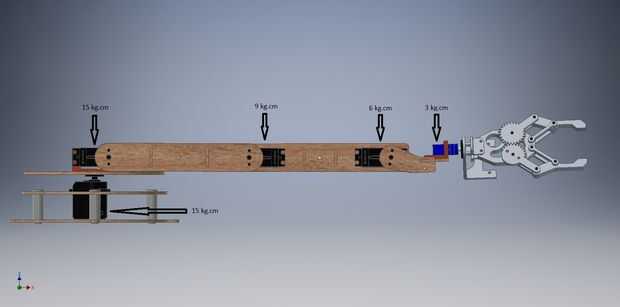
Los resultados finales de torques de motores cuando se utiliza la madera para este diseño como se muestra en la figura 4.













