Paso 6: cableado

-Para el control de los potenciómetros:
Usamos arduino UNO para controlar los motores para hacer la funcionalidad que desee.
Utilizamos potenciómetros para simular el movimiento de los motores con el eje del eje del potenciómetro.
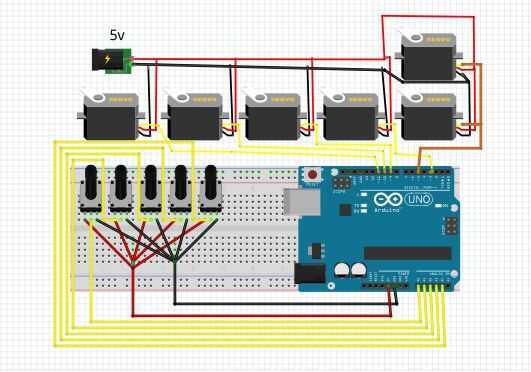
En potenciómetro de cableado Conecte el pasador central con entrada pin analógico de arduino y otros pines con alimentación (VCC - GND).
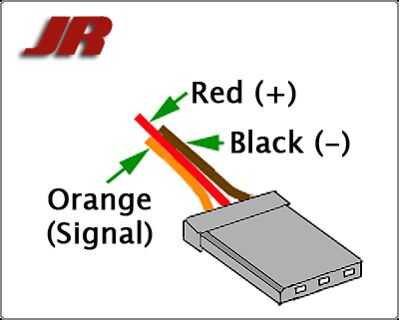
Y cableado del motor servo es como en imagen 5
El cableado de todo el componente uno con el otro es como cuadro 6
-Para el control con pulsadores:
Ha preferido utilizar arduino Mega o dos arduino UNO
Utilizaremos dos pulsadores para cada motor, para giro a la derecha y otro para el contador horario.
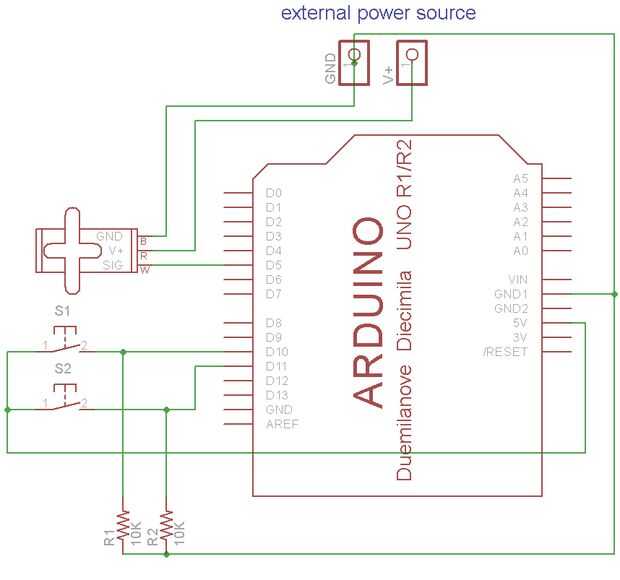
El cableado de los pulsadores es como cuadro 6 , utilizamos pull-down resistor para evitar ruidos.
El cableado de los pulsadores y motor con arduino es como cuadro 7 y de la misma manera conectar los otros motores y los botones.
-ADVERTENCIAS:
Debe conectar todos los motores con una fuente de energía externa como fuente de alimentación de PC porque los motores consumen corriente más actual para evitar el daño de la Junta de placa de arduino.
El circuito debe tener un terreno común para trabajar correctamente, eso significa que tienes que conectar la tierra del arduino con el suelo de fuente externa.













