Paso 9: Colocación del codo al hombro
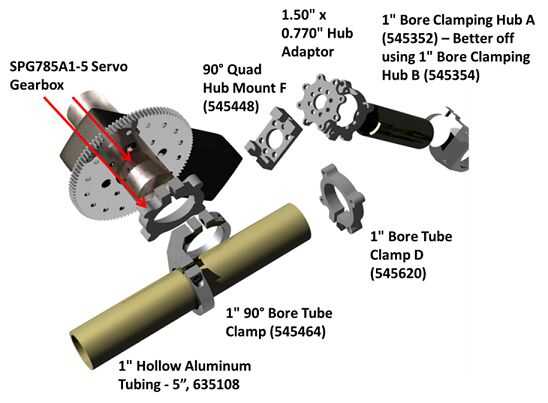

Para este paso necesitarás lo siguiente:
- 1" hueco del tubo de aluminio - 3", 635104
- 1" diámetro de sujeción eje B (545354). Este es el agujero a través versión del eje de sujeción A
- 90° F de montaje cuádruple eje (545448)
- 1,50 "x 0,770" Hub adaptador
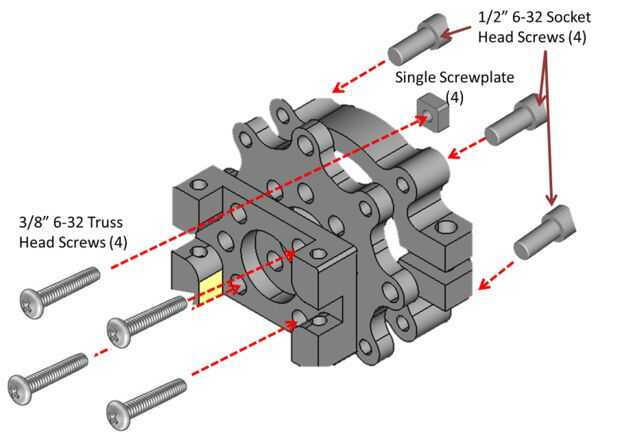
- (4) placa de tornillo 6-32Single
- (8) 6-32 tornillos de cabeza hueca - 1/2" de largo
- (4) 6-32 tornillos de cabeza segmental - 3/8" largo
- (2) muelles de extensión 9/32 "x 2-13/16"
Primer paso en el montaje el montaje de abajo es mate que el adaptador del cubo con la de 1" diámetro sujeción eje A. Alinee los agujeros del adaptador y del eje de sujeción. Tomar la toma de 1/2"(4) tornillos y atornillar las dos partes con una llave hexagonal de 7/64".
Siguiente paso es un poco complicado ya que no será capaz de apretar la tuerca en el tornillo de cabeza truss directamente. Primero uno de los 3/8" tornillos de cabeza segmental y deslícela a través del agujero pasante en la esquina superior izquierda de la cuádruple eje montaje como se muestra en la figura. Deslice el adaptador del cubo en el tornillo y alinee el eje de sujeción como se muestra en la figura de conjunto. Una vez hecho esto retroceden sobre el tornillo hasta que quede con Hub adaptador y la placa tornillo tornillo - ahora apretar el tornillo.
Ahora toma el tubo y colocar en el eje de sujeción y apretar en el tornillo de cabeza hueca para bloquear la tubería en su lugar. Asegúrese de que esté tan apretado como usted puede conseguir.
A continuación tomar el conjunto e insertar en la parte inferior de la caja del servo. Trabe el conjunto en su lugar con los (4) restantes tornillos Allen.
A continuación tomar los resortes de dos extensiones y enlazarlos. Tome un extremo de un resorte y un deslizamiento entre las pestañas de 90 grados agujerea abrazadera. Deslice el tornillo de apriete a través de los agujeros y apriete ligeramente el tornillo de cabeza hueca antes de instalar el conjunto de codo. Ver foto adjunta.
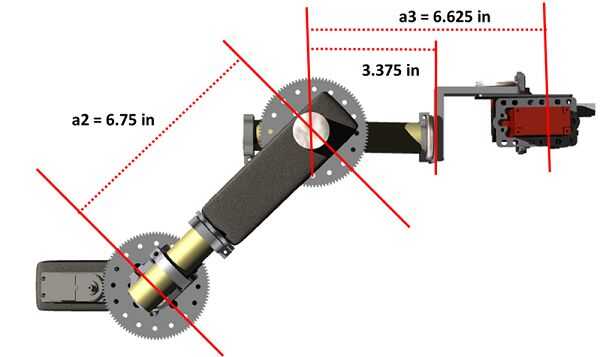
Paso final es mate el codo con el hombro. Tomar el conjunto del codo y deslice el tubo en los años 90 grados centro de fijación de la Asamblea de hombro. La distancia entre el eje de sujeción de hombro y codo fijación eje es aproximadamente 1.25" apriete hacia abajo en el tornillo de cabeza hueca en la abrazadera. Comprobar la distancia entre los centros por lo es como se muestra en la figura.
Tenga cuidado cuando lo dejas ir, en este momento el brazo no se equilibra así que una vez que lo dejas ir que caerá como una roca.












