Paso 13: Anexe el montaje de la muñeca al antebrazo

Piezas necesarias para este paso:
- (4) 1/2 6-32 tornillos de cabeza segmental
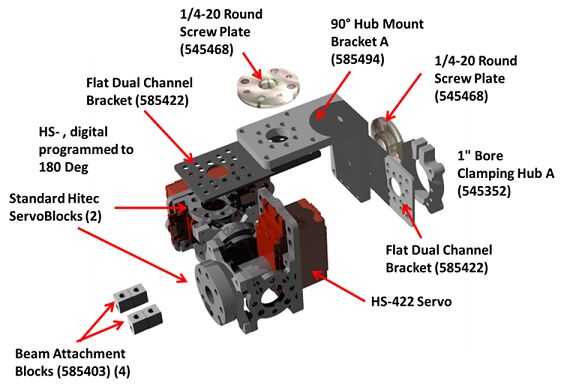
Coloque la placa de centro echada al piso doble canal ' soporte de canal en la delantera con los tornillos de cabeza segmental (4). El servoblock del rodillo debe ser casi sobre la línea central de la caja de cambios de base
Deslice los cables del servo a través del tubo de aluminio y utilizar las extensiones de servo servo cable para conectar los tres servos al Maestro mini. Ahora debería tener un brazo de robot de trabajo que puede ser controlado a través del mini-maestro.
Siguiente conjunto de pasos es configuración de la electrónica para el brazo.












