Paso 14: Cableado hasta la electrónica
Piezas necesarias para este paso:
- 6" x4.5" Junta de Perf
- (4) 1" macho-hembra 4-40 separadores
- (4) 1/4" macho-hembra 4-40 separadores
- (4) 1/2" macho-hembra 4-40 separadores
- (12) tornillos 1/4" 4-40
- Controlador de canal Maestro mini 18
- Ardunio Uno
- (2) RB-Dim-xx Breakout Boards
- (1) RB-Dim-14 10W cambiando el regulador situado a 9v
- (1) RB-Dim-20 5v 1A regulador de conmutación
- Cable de silicona de calibre 20 (blanco y negro)
- Cables de puente macho
- (3) puentes negros
- (2) puentes rojos
- (4) los cables de puente hombres y mujeres
Perf Board:
- Taladre los agujeros para la esquina 4 separadores de 4-40
- Utilizar la Arduino Uno Borads de Breakout y mini-Maestro como su plantilla para la perforación. Diseño de sus componentes en el tablero de perf y marca con el agujero patrón donde que quieres colocarlos.
- Utilice la tabla perf como plantilla para marcar la placa de base para la perforación
Coloque los componentes:
- Utilice los separadores de 1/4" 4-40 (4) y atorníllelos en el tablero de perf. (4) tornillos 4-40 y regulador de tableros de arranque y sujete a los soportes
- Tomar los separadores de 1/2"(4) y Monte el Arduino Uno a la Junta de perf
- Usted necesitará 2 tornillos pequeños para el mini-Maestro. Tenía en mi caja de chatarra y no está seguro de qué tamaño eran.
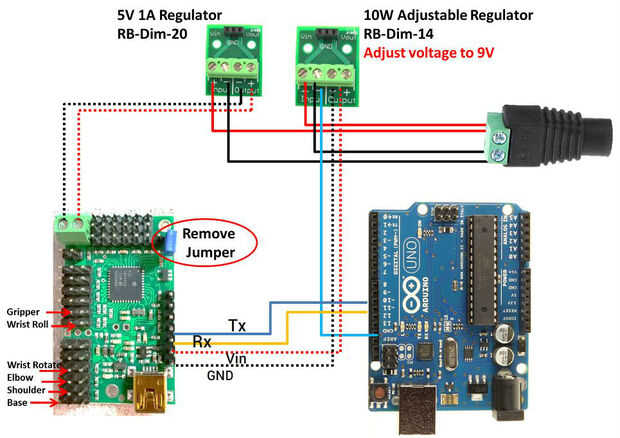
Cableado de la electrónica:
- Longitudes de corte (2) de los 20 calibrador de alambre (rojo) 5" y tira de aproximadamente 1/2" en cada extremo. Lo mismo para los cables negros.
- Tomar los dos cables rojos y deslizamiento en DC hembra conector y apriete el tornillo para que el alambre no se mueva. Estas son la potencia (+) los alambres así que sujete a la (+) lado del gato. Lo mismo para los cables de blacattak (tierra) pero fije al lado (-) de la toma de CC.
- Ahora Conecte el otro extremo de los cables negro y conéctelos al lado (-) de cada uno de los tableros de arranque. Hacer lo mismo con los cables rojos. Recuerde que debe apretar los tornillos en el terminal de tornillo.
- Tomar un puente macho negro y deslícelo hasta encajarlo en el perno de tierra en la ONU y deslice el otro extremo en el terminal (-) de la Junta de arranque de voltaje variable.
- Ahora toma un negro (o color de su elección) macho puente y deslizamiento en el (-) terminal de la Junta de arranque regulador de 5v (salida lateral) del tornillo y apriete el tornillo. El otro extremo debe se deslizó en el lado (-) de la terminal de tornillo en el mini-Maestro. Ahora toma un rojo macho y conecte un extremo al borne tornillo de salida de 5v. (+) lado y el otro extremo (+) tornillo terminal del pequeño Maestro.
- Remueva el jumper suministrado en el mini-Maestro.
- Tomar un macho puente de alambre para una masa común para el Arduino lo instale a la salida del tornillo regulador variable (-) terminal e insértelo en el conector de tierra de la Arduino
- Tome un jumper de hombres y mujeres y conecte la conexión para la salida (+) de la Junta de arranque regulador variable y el otro extremo al pin Gnd del mini-Maestro.
Tome un jumper de hombres y mujeres y conecte la conexión para la salida (-) de la Junta de arranque regulador variable y el otro extremo al pin Vin del mini-Maestro.
Tome un jumper de hombres y mujeres y conecte la conexión que el pin Rx del mini-Maestro y el otro extremo al pin 11 de Arduino
Tome un jumper de hombres y mujeres y conecte la conexión para el pin de Tx del mini-Maestro y el otro extremo al pin 10 del Arduino.
- Vuelva a conectar los cables de servo del brazo al pequeño Maestro.












