Paso 6: Montaje del Servo SPG785A1-5 (Asamblea de hombro)

Para este paso necesitarás la caja de engranajes del Servo de SPG785A1-5 (7:1), la abrazadera de tubo de diámetro de 90 grado 1" y un cable de extensión de servos de 12...
Primero conecte el servo de la caja de cambios para el canal 1 del mini-Maestro y configurar los ajustes de servo.
- Conecte al Mini-Maestro a la computadora y abrir el centro de Control Maestro.
- Activar el canal 1 en el centro de Control
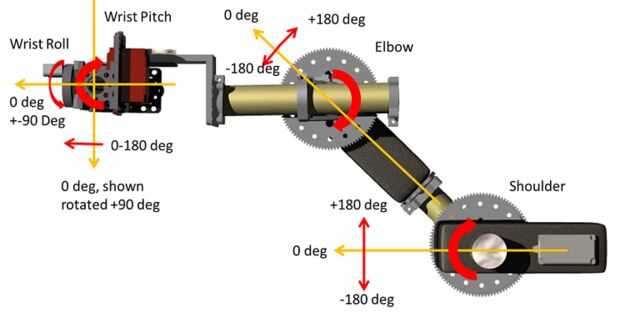
- Mueva el deslizador del canal 1 a 1500 y coloque una marca en el engranaje del eje. Para el montaje de codo 0 grados puntos adelante. Ver la foto de orientación de servo en el paso.
- Siga los mismos pasos para determinar tu min y valores máximos de +-180 grados como lo hizo en el paso 5.
- Nombre del canal "Hombro" en la ficha Configuración de canal.
- Ajustar la aceleración a 40 - controla la velocidad del servo. Nota: Puede cambiar esta configuración de este última a través de la biblioteca Arduino Mini Maestro antes de cargar el sketch de Arduino.
- Sistema "GoTo" a una posición que es cerca de + 135 grados (la línea debe ser aproximadamente 45 de vertical apuntando hacia arriba.
A continuación mover el servo al central (neutro) o 0 grados, aproximadamente 1500 en el centro de Control y fije la abrazadera de tubo de diámetro de 1" para que quede alineado con 0 grados y apriete el tornillo hexagonal con la llave hexagonal de 7/64 pulg.












