Paso 4: Conexión de componentes electrónicos



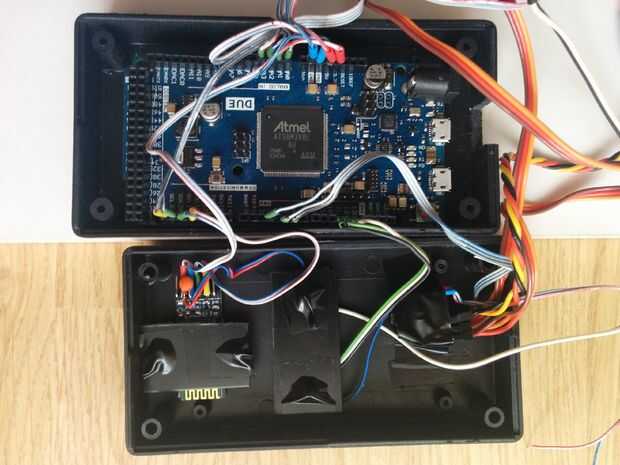
El controlador principal de este sistema electrónico es Arduino DUE. He elegido debido debido a su gran cantidad de memoria (512 Kb Flash, 96 Kb Sram) y compatibilidad con 3.3V voltaje (bluetooth, pantalla OLED). Sin embargo, si tienes un Arduino Mega 2560 se puede utilizar en este proyecto en lugar de debido. Para el control remoto del brazo robótico usé un módulo popular bluetooth HC-05. Para poder controlar a la garra utiliza el controlador de motor DC TB6612FNG. Servos digitales pueden ser alimentados desde una fuente de alimentación externa o baterías LiPo a través de un conversor reductor de voltaje (dando el voltaje de salida de 5 o 6V). Servos se controlan directamente desde el Arduino DUE (salidas: 3,5,6).
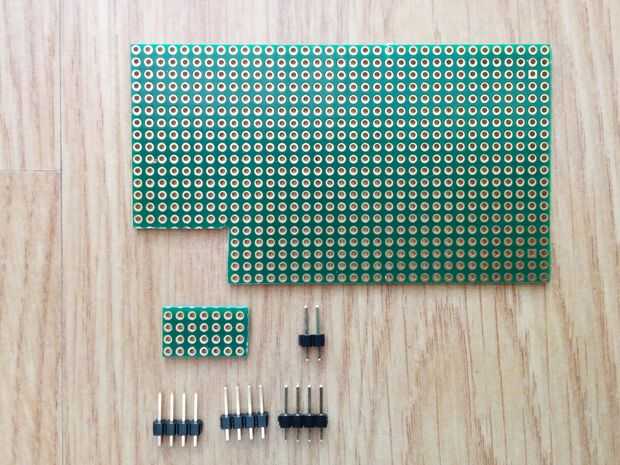
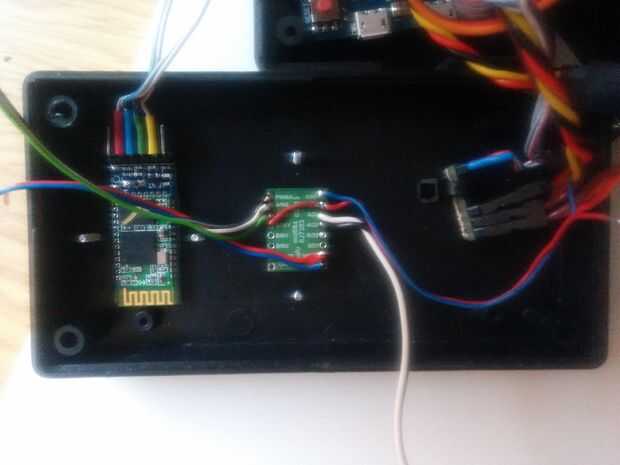
Todas las conexiones de los módulos electrónicos son los siguientes:
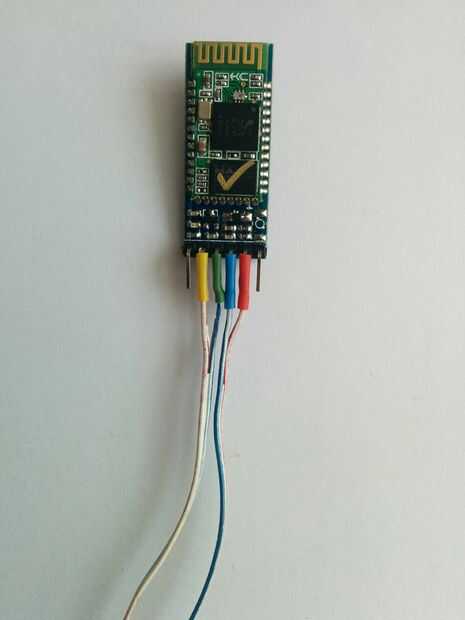
- DEBIDO -> HC-05
- Tx1 (18) - Rx
- RX1 (19) - Tx
- GND - GND
- 3.3V - VCC
- DEBIDO -> OLED 128 x 64
- SCL (21) - Scl
- SDA (20) - Sda
- GND - GND
- 3.3V - VCC
- DEBIDO -> sensores analógicos de distancia (GP2Y0A21YK)
- A0 - Sensor derecho
- A1 - Sensor delantero
- A2 - Sensor izquierdo
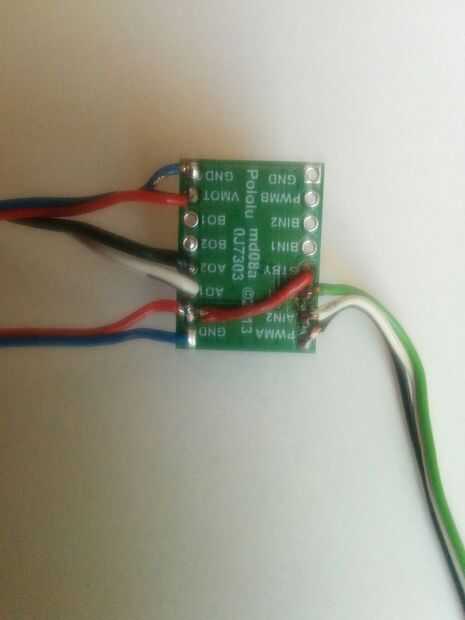
- DEBIDO -> controlador de Motor TB6612FNG
- 11 - PWMA
- 12 - AIN1
- 13 - AIN2
- 3.3V - VCC (voltaje de lógica)
- GND - GND
- 5V (o 6V) de la batería - VMOT
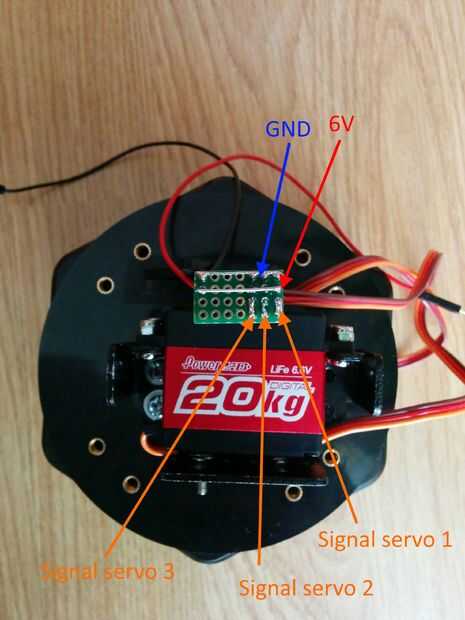
- DEBIDO -> Servos digitales
- 3 - señal Base
- 5 - señal hombro
- 6 - señal codo
- GND - GND
- 5V (o 6V) de la batería - VCC
 con pfodApp")











")
