Paso 3: crear


En brazo robótico que se nombran a cuatro partes importantes como-:
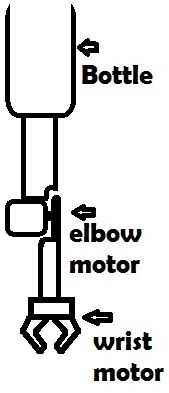
· Botella < para sujetar el brazo y la porción cortada >
· Codo motor < para operar el movimiento del codo >
· Motor de muñeca < para operar el movimiento de los dedos >
· Sensores < para controlar el brazo robótico con movimiento de los músculos >
Botella: - se utiliza para unir el brazo robótico a la porción cortada. Investigué que forma de la botella es la forma perfecta para unirse a la porción cortada
Codo motor:-motor de codo se utiliza para realizar trabajo de codo. Investigué que codo motor necesita ser más potente para trabajar con el peso del motor de la muñeca, segunda calle apoyo y el objeto que estamos recogiendo...
Motor de la muñeca:-motor de la muñeca era truco para mí porque para llevar a cabo las acciones de la figura es muy difícil. Encontré a dos pinzas durante la investigación que eran útiles. Pinza de primera fue capaz de recoger cualquier tipo de objetos de cocina como la cosecha encima de la taza para tomar té. Griper segundo está diseñado y fabricado por mí que puede recoger objetos pequeños como bola, lápices, plumas etc....
Sensores: - para encontrar sensores de movimiento en el mercado es muy difícil de encontrar en mi ciudad así creado mis propios sensores que son trabajados por el movimiento de figuras de las piernas. Debido a la escasez de tiempo no sensores conectados al brazo. Brazo es operado por clic de botón.
Este sensor funciona realmente, pero que no he conectado al brazo pero lo he probado en la luz.
¿Cómo funciona?
Usted esta viendo en foto es azul tipo de cosa. Tiene dos polos está conectado al dedo, poco abajo hay una papel de aluminio. Al levantar hacia arriba el pulgar conectar dos polos y se completa el trabajo de la red. SIMPLE...
RESUMEN DE PROYECTO REAL...






")




")

