Paso 3: Paso 3: realizar las conexiones
A la hora de realizar las conexiones electrónicas encontré un útil programa llamado Fritzing que me permite mostrar el circuito del proyecto con el cableado y cuadros claros. He decidido usar este programa para mostrar y explicar cómo hacer las conexiones en el camino. Esperemos que sean lo suficientemente claros como para que cualquiera pueda seguir.
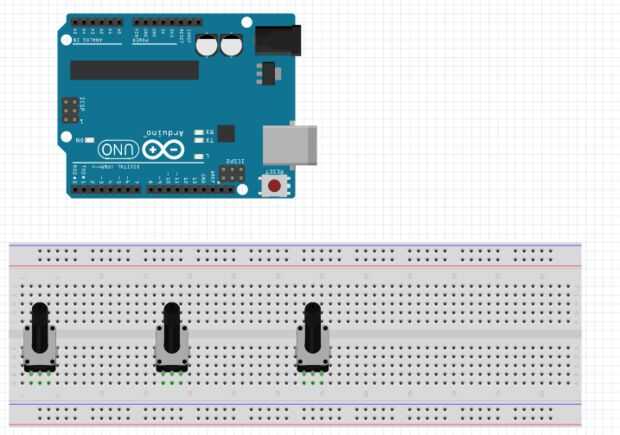
Para empezar, los potenciómetros se colocaron en el protoboard y un Arduino Uno fue colocado justo encima de la placa (paso 1).
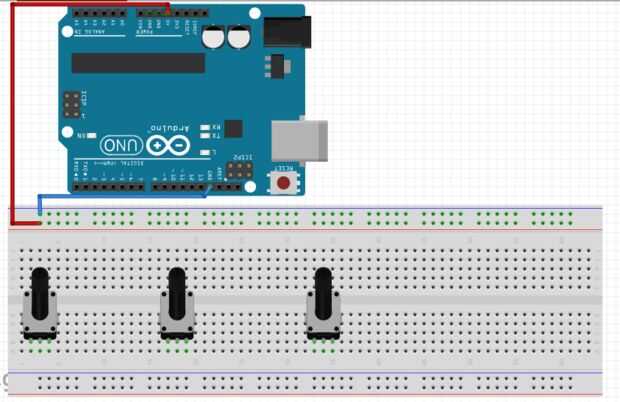
Voy a intentar seguir la disposición de las partes la forma que se muestran en el video. Por lo que los 3 potenciómetros se colocaron como se muestra. Cada potenciómetro tiene 3 puntas o conexiones. En esta configuración se conectará la punta a la izquierda a los 5V de Arduino y la punta a la derecha se conectará a un pin de tierra en el Arduino. El diente del medio para cada potenciómetro es la señal que se conectará a un pin analógico en el Arduino. Así que lo siguiente que hice fue conectar un cable desde el pin de 5V de Arduino en el riel de alimentación en la parte superior de la placa y un cable entre un pin de tierra en el Arduino al riel negativo en el protoboard como se muestra en el paso 2.
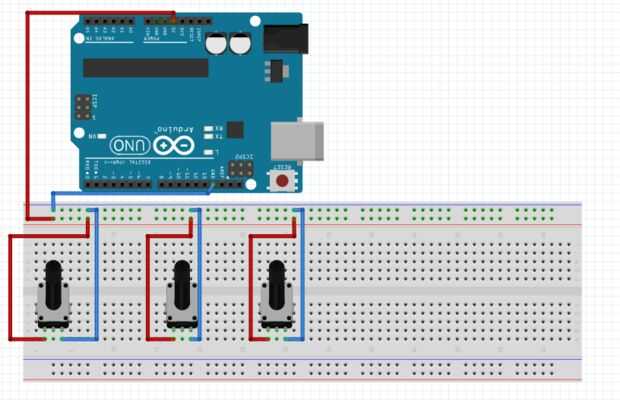
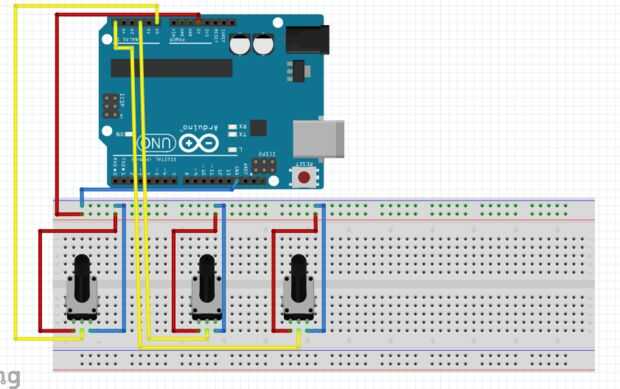
Una vez que se hizo, es hora de conectar todas las clavijas izquierdas de cada potenciómetro el raíl positivo y los dientes justas en el carril de tierra, como se muestra en el paso 3. Para el diente pasado en cada potenciómetro, centro uno, que estaban conectados a un pin analógico específico en Arduino como se muestra en el paso 4.
Así que para el primer potenciómetro a la izquierda, el pin medio estaba conectado A0 en el Arduino. El segundo potenciómetro tiene su pin medio conectado al A2. Pin medio de potenciómetro pasado fue conectado a A5. Estos cables de señal proporcionará las diferentes lecturas que el potenciómetro tendrá durante el giro de la perilla.
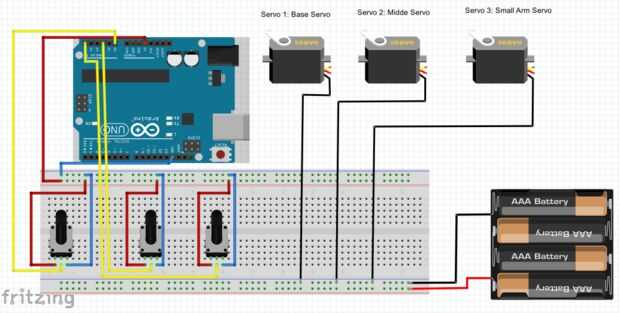
El siguiente paso sería conectar una fuente de energía externa a la protoboard para los servos. La batería está conectada a los rieles fondo, como se muestra en el paso 5.
Los tres servos también tendrá sus cables de tierra conectados al riel negativo inferior como se muestra en el paso 5. Los cables de tierra en los servos micro sería los cables marrón. El primer servo, Servo 1, será el servo que es pegado a la base y conectado con el primer brazo. Servo 2 será el servo que será la conexión entre el primer y el segundo brazo. Servo 3 será el último servo que controla el brazo pequeño pasado. Se conecta el brazo 2 al brazo 3.
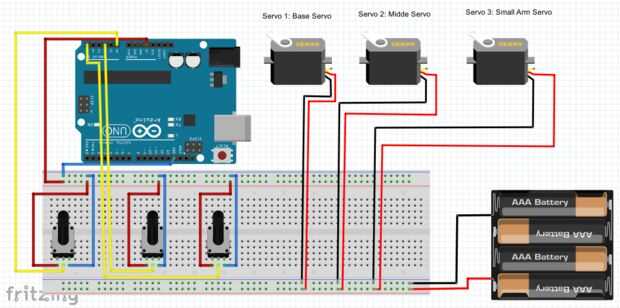
Una vez hecho esto, es hora de conectar los cables de alimentación de cada servo en el riel de alimentación en la parte inferior. Los cables de alimentación de cada servo será el cable rojo. Las conexiones será como sigue en el paso 6.
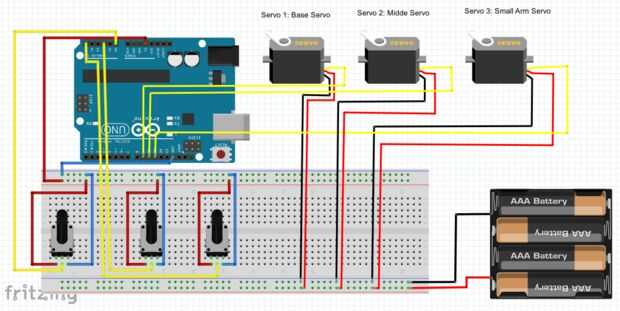
Una vez que los servos tienen su potencia y cables conectados a los rieles inferiores de la tierra, la última cosa que conectará los cables de señal a Arduino. En el diagrama, estos cables de señal son de color amarillos. Pero en los actuales micro servos, cables naranja. Modo Servo 1, se conectará el cable de señal al pin 9. Servo 2 va conectado al pin 10 y Servo 3 va conectado al pin 11. Así, el circuito final es como se muestra en el paso 7.
Eso es todo para el cableado y las conexiones para el brazo robótico simple. La última cosa a hacer es subir el programa en el Arduino. Para alimentar el Arduino, utilizan el cable USB o una batería de 9V para energía.













