Paso 3: El proceso de diseño (pensamiento)
Como en cada proyecto, el diseño
etapa puede hacer o romper todo el proyecto. Antes incluso recoger un lápiz o dibujo en CAD, teníamos que comprender nuestro problema. Después de leer las reglas, nos sentamos con tantas personas como pudo y comenzó la lluvia de ideas. Es increíble lo que puede hacer un grupo de personas con ideas rebotando constantemente cambiando a través del punto de vista de cada persona. Nos vimos pasar mucho más tiempo que el esperado sólo allanar detalles de diseño pequeño durante este proceso. Debido a toda esta atención, sin embargo, el resto del proyecto fue muy suave.
El diseño:
Pasamos tiempo brazo robot probada investigando diseños en internet. Al principio, hemos considerado hacer un brazo robótico de estilo conjunto articulado "tradicional", pero encontramos que al ser inviable debido a las restricciones de tamaño, coste y alto motor holding torque. Después de desechar ese concepto, nos encontramos con el diseño de estilo SCARA. Esto nos pareció ser más eficaz y fácil de implementar y controlar. Este diseño nos permitida usar motores de par baja debido a esto los diseños más naturaleza planar, así que los motores no tendría que soportar directamente el peso del brazo. Implementar el control sería más fácil como el posicionamiento de las efectoras del brazo no requieren el movimiento de cada motor.
La garra:
La garra fue a través de dos iteraciones de diseño fabricado con múltiples conceptos para cada uno. El primer diseño utiliza un motor y una varilla roscada para mover un lado de la garra hacia el otro. Hubo un embrague de par motor que activa un interruptor para detener el movimiento de la garra cuando agarró un objeto. Este método fue probado, pero no tenía la fuerza de agarre que era necesaria para algunos de los elementos más pesados. También era bastante ruidoso y no es una solución elegante.
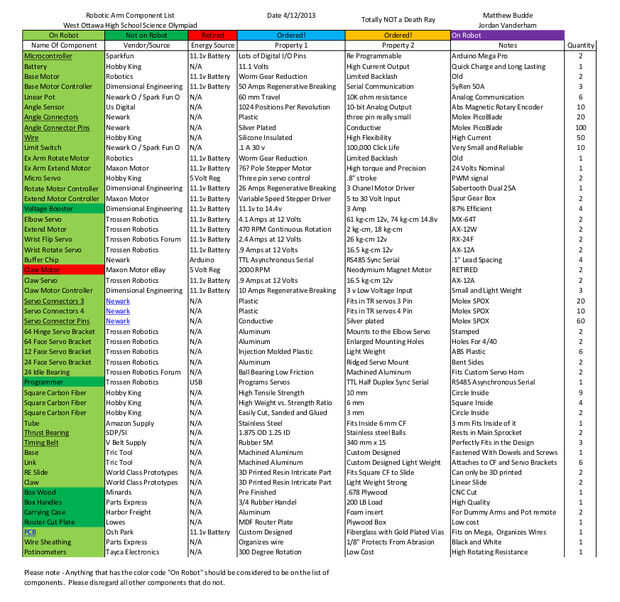
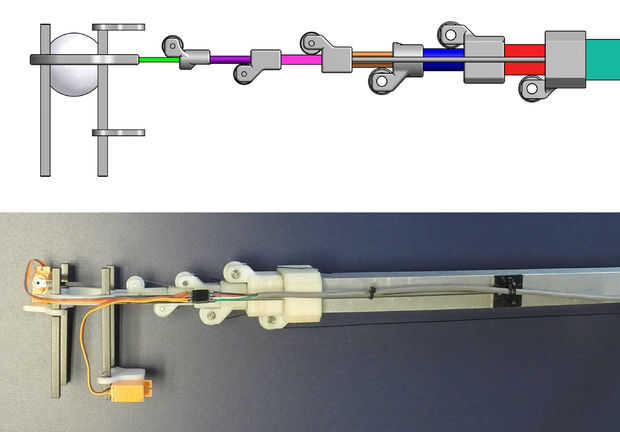
El segundo diseño utiliza un servo Dynamixel AX-12A para tirar de un lado de la garra hacia el otro a lo largo de cuatro varillas guías utilizando el movimiento de giro del servo para enrollar una cuerda en un carrete de cualquier lado. Este fue un método muy eficaz debido a que se puede controlar el par de los servos para prevenir catastrófico ping-pong bolas machaca. El movimiento lineal de esta garra hace más fácil recoger objetos desde un lado de la garra nunca se movió, lo que nos permite utilizar ese lado como un punto de referencia y el otro como la fuerza de agarre. La otra ventaja de este diseño de garra es que, a diferencia de algunos otros diseños, se mueve en forma lineal. Otras garras, como la garra de tipo tijera, hunden como agarre. Ese movimiento extra complicaría nuestra solución elegante para manipulación de objetos.
El brazo:
Se puede ver la cantidad de tiempo de diseño que ponemos en esta parte sólo mirando. Fuimos agobiados con restricciones de presupuesto y el tamaño y la tarea con problemas de rango, fuerza y capacidad. Este brazo fue diseñado para jugar con nuestras restricciones y optimizar nuestras fortalezas.













