Paso 8: electrónica


Las dos principales armas son controladas por un par de placas Arduino Mega Pro de Sparkfun. Aunque no utilizamos cerca de la cantidad de pines digitales que ofrecen estas tarjetas de Mega, los elegimos debido a sus múltiples puertos serie. Fueron necesarios tres puertos serie; uno para cada protocolo de comunicación en los diferentes servos Dynamixel (irá más en profundidad sobre eso en programación) y otro para los controladores de motor de Syren de dimensión ingeniería.
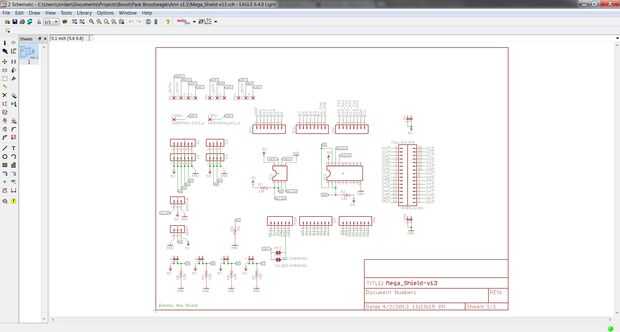
Hemos diseñado un PCB personalizado y un circuito en formato EagleCAD para conectar todos los componentes necesarios para el Arduino. Estos incluyen dos fichas de búfer para la comunicación entre el Arduino y los servos de Dynamixel, variadas resistencias y conexiones para energía y comunicaciones entre todos los componentes. Estos diseños fueron enviados entonces Parque de SST para la fabricación de alta calidad.
El tercer brazo de extensión es controlado por un Arduino Uno con un proto-escudo en la parte superior para conectar los controles a las necesarias entradas y salidas del microcontrolador.
Los controladores para todos los brazos de tres enchufe en sus respectivos consejos a través de filas de encabezado de púas para facilitar la conexión. Los PCB son soldados a las placas de Mega Pro para garantizar una conectividad fiable.
Los tres brazos son impulsados por la misma batería de iones de litio de 11,1 voltios de HobbyKing. Enlace
Componentes y proveedor:
Batería - https://www.hobbyking.com/hobbyking/store/uh_viewI... Microcontrolador - https://www.sparkfun.com/products/1100
También utilizamos los 3 AnyVolt para la optimización de la energía en nuestro servo de codo, pero unfourtionally tenemos que remmove les. Leer más sobre paso 12: crear.













