Paso 8: Construcción de plataforma LEGO y el Monte BrickPi
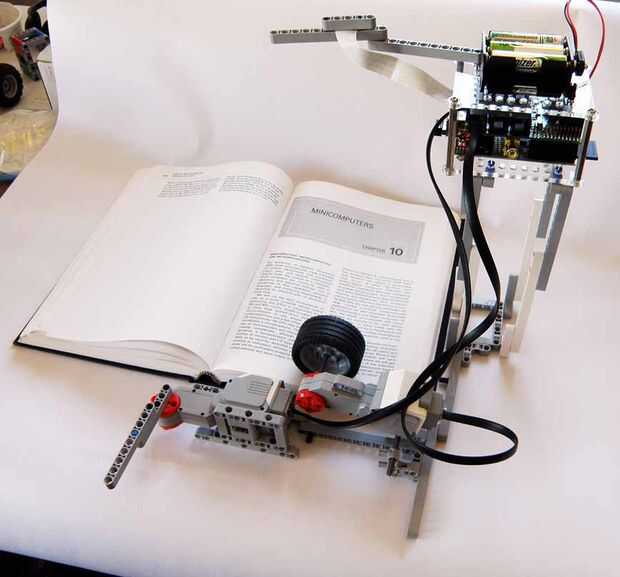
Puesto que queríamos utilizar la cámara del Raspberry Pi, la entera configuración de BrickPi tuvo que colocarse un poco alto para obtener una buena imagen de la página. La estructura que terminamos con buscando un poco como un magro at-at walker de star wars.
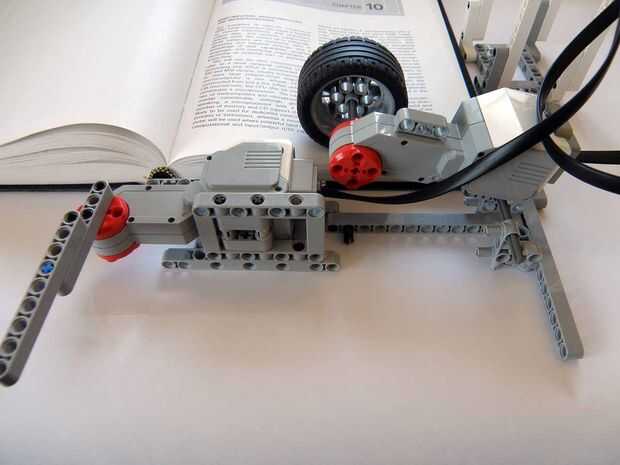
Es un poco complicado configurar los motores en la parte inferior. El motor con brazo giratorio se ha establecido de manera que sólo va una pulgada dentro del libro para que pueda obtener un apretón suave en la página.
El truco más grande se encuentra con el motor conectado a la rueda. El motor no se fija a la plataforma pero puede girar libremente desde el punto de que está conectado a la plataforma. Esto es muy importante porque mantiene las páginas presionadas para que las ruedas pueden conseguir un apretón en la página. Otra cosa importante a hacer es girar la rueda sólo para el tiempo que tarda una página salir de la rueda y gire la rueda para que las páginas extras que podrían haber sido levantadas se traen.
En el repositorio de Githubde Dexter Industries, hay un código de prueba llamado arm_test.py para ayudarle a calibrar el brazo para el movimiento. Basta con conectar el motor Puerto A del BrickPi y cambiar los valores de 'speed_roller','speed_arm,' ′t1y 't2', hasta llegar a movimiento impecable.





")






