Paso 8: Construcción del brazo robótico



Probablemente la parte más difícil de esta compilación es conseguir un brazo robótico para pasar las páginas en una pantalla táctil capacitiva.
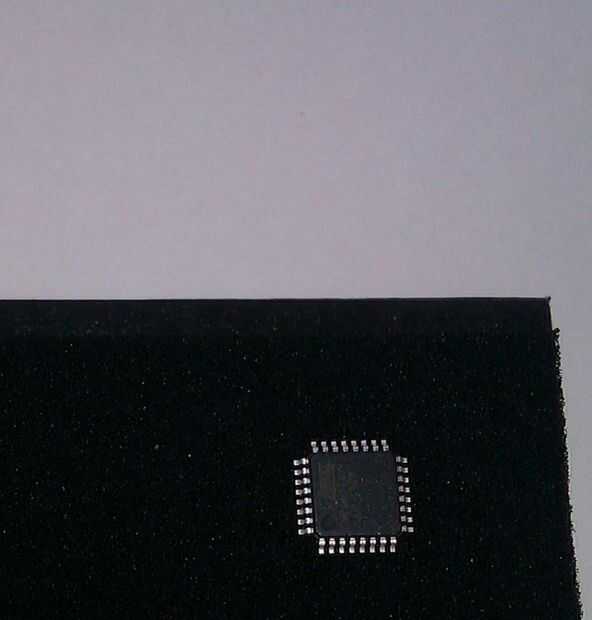
Después de probar un par de materiales, el mejor candidato para un stylus capacitivo era un poco de espuma antiestática (el uno que viene con el IC de Mouser!). También se puede usar normal esponja de la cocina, pero tiene que ser húmedo, tan sólo hay que poner unas gotas de agua en él. Nos encontramos con rendimiento mejorado con un conductor de alambre con la espuma y envuélvalo alrededor de el brazo. También se encontró que ayudó a conectar un condensador nF 47 entre la espuma y el suelo en la BrickPyo.
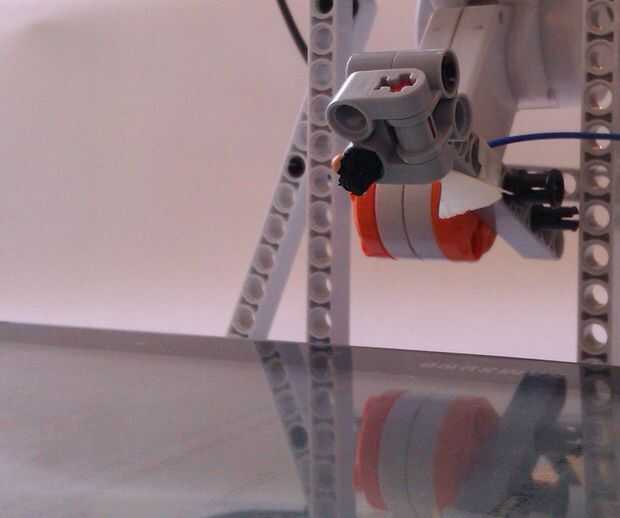
Fije la pieza de espuma sobre un brazo que se extiende desde el motor y conecte el condensador. También atamos un pequeño bloque LEGO, inclinado, que ayuda a hacer un contacto fácil con la pantalla táctil.
Coloque la tableta en una posición adecuada para que el brazo puedo moverse hacia arriba y hacia abajo correctamente y pasar las páginas en la pantalla.
En el repositorio de Github, hay un código de prueba llamado arm_test.py para ayudarle a calibrar el brazo para el movimiento. Conecte el motor al Puerto C de BrickPi y cambiar los valores de ' t ' y 'sp', hasta llegar a movimiento impecable.







