Paso 1: Piezas y montaje.


-Arduino Uno
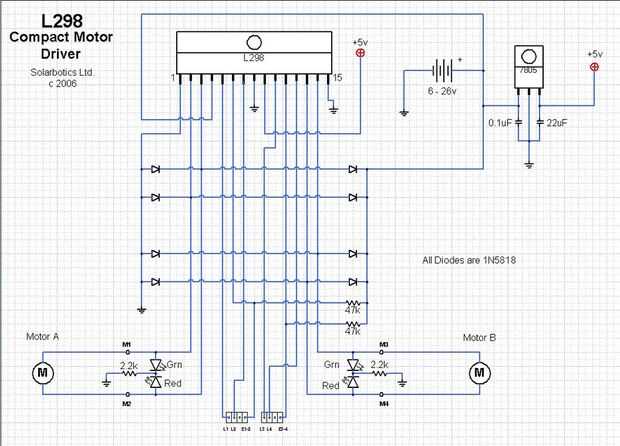
-L298 Driver Motor (x1)
-Veroboard (x1)
-Hombre o mujer tira de cabecera (lo suficiente para adaptarse a tu arduino (32))
-1N4007 diodos (x8)
-0.1uf y un condensador de 22uf
-Bloque de conectores (x3)
-Jumper cables
NOTA:
-E1-2 y E2-3 se conectan al + 5v son activar pines por lo que no conectan a un conector de bloque sólo a + 5v en caso de necesitar añadir un servo de dirección necesitamos suficientes pines pwm.
-para mí no utilizo el rojo y verde LEDs y 2.2 kohm resistencia, contó con la retroalimentación de la comunicación Serial que he escrito.
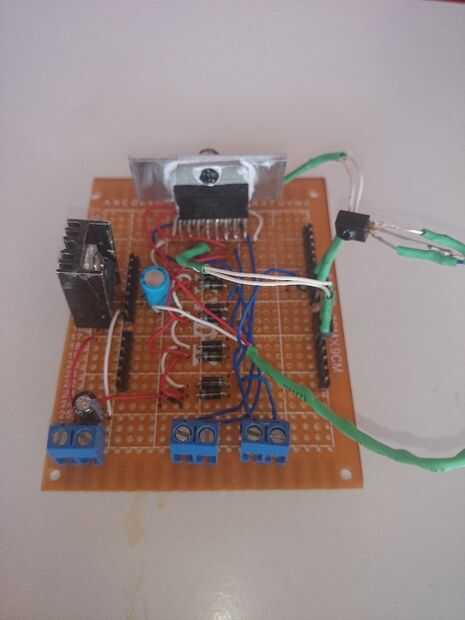
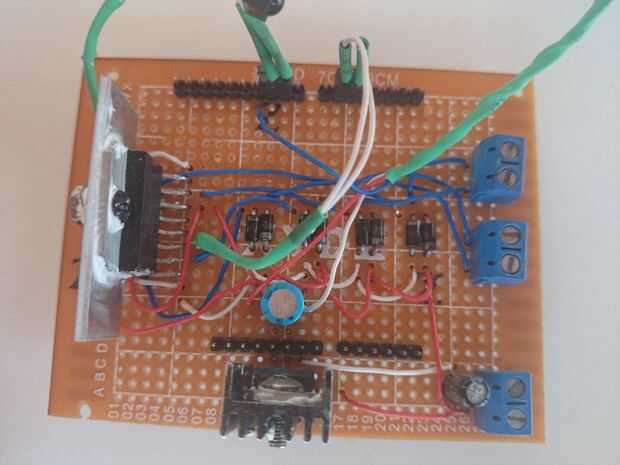
Asamblea:
usted podría grabar una placa de circuito o sólo tiene que utilizar los cables del puente como lo hice.
no voy a gran detalle sobre cómo soldar las piezas, si quieres seguir mi diseño de piezas en las fotos anteriores,
y las cabeceras de soldadura como se muestra en la figura que es la forma más sencilla.
primero cortarlas para que coincidan con tus pines de arduino, aunque no estaban usando los pines de arduino es mejor encajar encabezados en todos ellos para que se vea bien y sea más estable.
luego coloque las cabeceras como lo haría cualquier componente y por debajo de la soldadura.
.
L1 y L2 están conectados a los pines de arduino, 5 y 6 respectivamente que control de motor (A) en las patillas 2, 3 del l298 (hacia delante y hacia atrás).
L3 y L4 son conectado a arduino los pines 9 y 10 respevtively .que control motor (B) en los pernos 13,14 del l298 (hacia delante y hacia atrás).
.
.
.
.
Cuando el hecho con el hardware puede mover al siguiente paso.




")








