Paso 8: programación
Software para este paso:
IDE de Arduino, descargas USC.
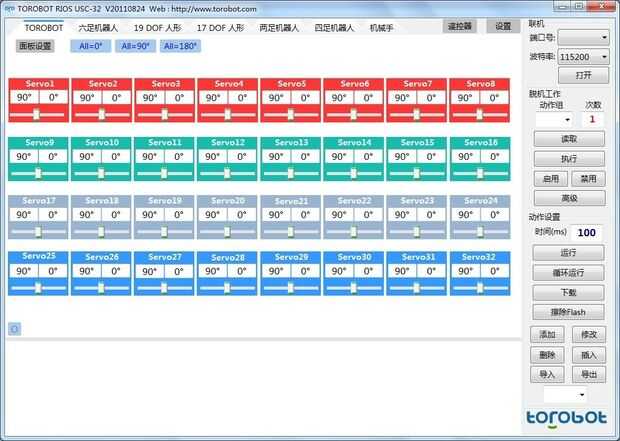
Antes de la programación con arduino es necesario conocer los límites de los servos y conocer los valores límites. Por ejemplo usando el ratón para arrastrar el control deslizante en el panel de servo (arrastrar el panel de servo correspondiente al canal con el cual está conectado el servo). Así que conectando la USC dentro el hexápodo con el usb en el programa me sale todo de max y min los valores de cada servo.
Ahora es momento de programar el arduino para el control de la USC. El controlador de servo es un dispositivo de esclavo, lo que significa que puede aceptar comandos o ejecutar comandos preestablecidos. No puede pensar en absoluto. Protocolo de comunicación: comunicación serial (nivel TTL), velocidad en baudios 9600, sin verificación bit, 8 bits de datos, 1 bit de parada para controlar el servo a través del controlador del servo. El formato de comando son:
-Control de un solo servo:
#1P1500T100\r\n
Datos 1 se refieren al canal de servo.
Datos de 1500 se refieren al servo' ubicación en el rango 500‐2500.
Datos 100 se refiere al tiempo de ejecución y representa la velocidad en la gama 100‐9999
-Controlar varios servos:
#1 P 600 #2 900 P #8P2500T100\r\n
Datos 1, 2 y 8 se refieren a los canales de los servos
600, 900 y 2500 los datos refieren a las posiciones de los servos que corresponden a tres canales
Datos 100 se refiere al tiempo de ejecución y representa la velocidad de 3 servos. Independientemente del número de servos, hay sólo un tiempo o una T. El comando se ejecuta al mismo tiempo; es decir, todos los servos funcionan simultáneamente.
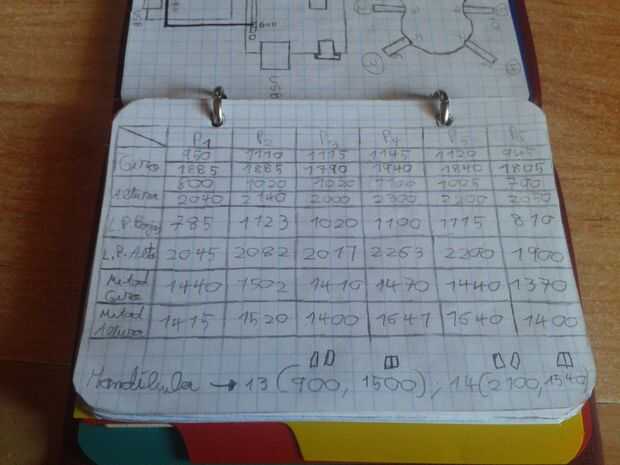
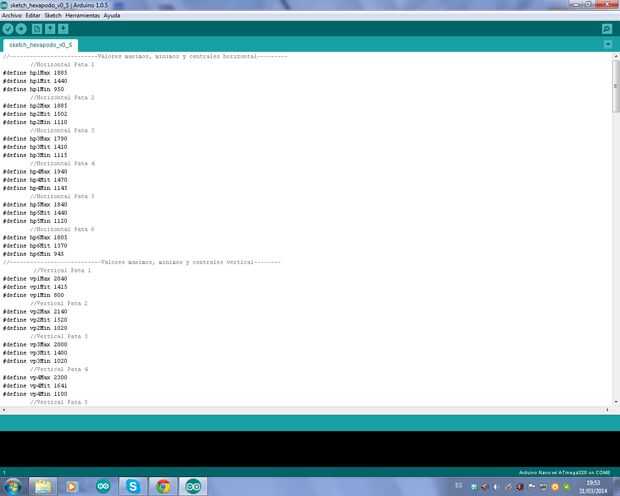
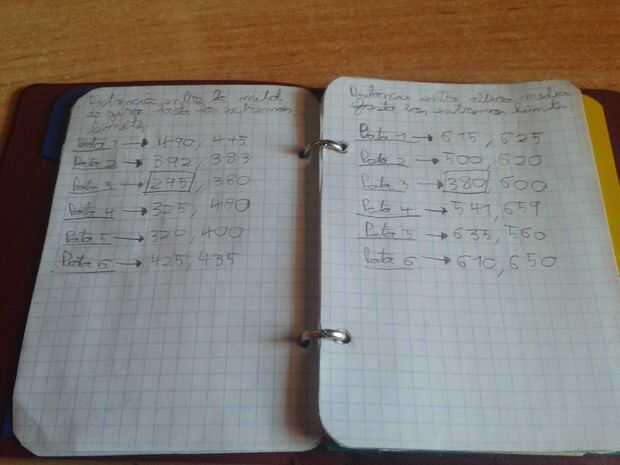
Dentro de los límites de cada servo es necesarios calcular el alcance máximo o "paso" de los servos horizontales para encontrar el más pequeño de ellos y convertir el máximo de un paso. Y entrar en esta variable en las ecuaciones de todos los movimientos. Lo mismo tendría que hacer con los servos vertical.
* Disculpen la mala calidad de las tres primeras películas. Los grabo con un celular viejo con mala calidad de video.
Nuevo video:
")





")






. ¿")