Paso 5: Con el Arduino
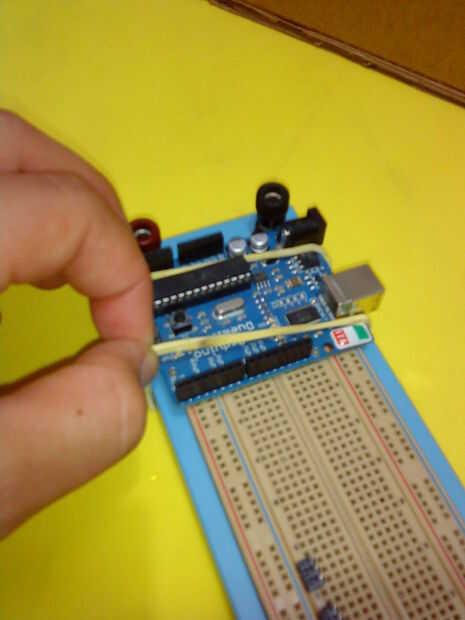
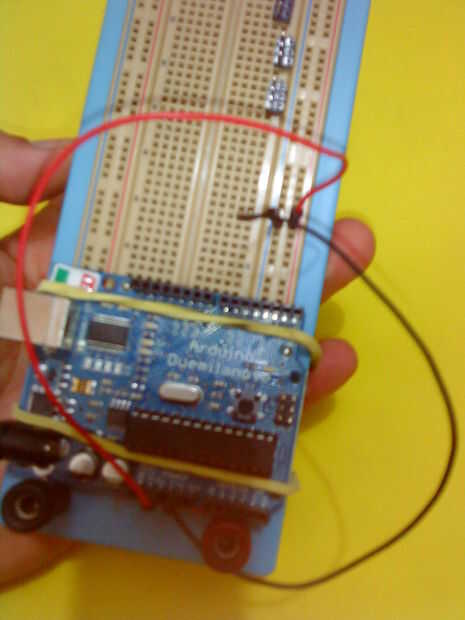
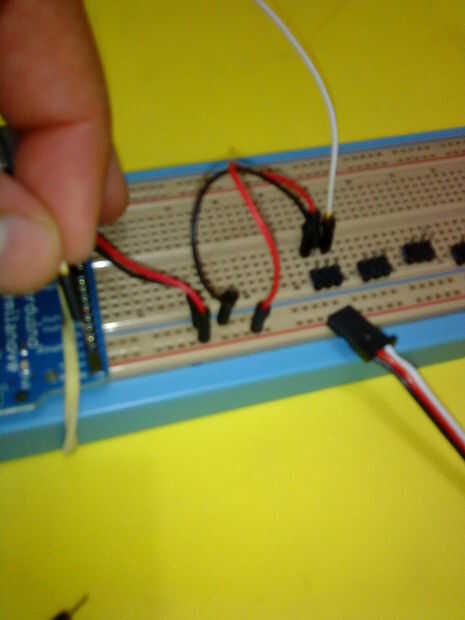




Para otros, simplemente Repita el proceso anterior con los otros puertos de salida del microcontrolador. Puse cinco causa más que la intención de poner más apoyos. Pero la tabla sería no dar cabida a todos.
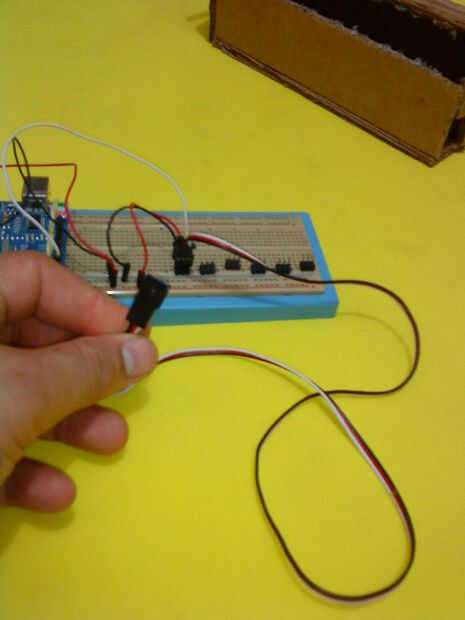
Obs.: Como medida de seguridad, el software no fue significado para activar más de dos servos al mismo tiempo.
Espero que he ayudado a agudizar su imaginación. Y este tutorial puede ser un punto de partida para algo más grande.
Críticas y sugerencias son siempre bienvenidos.
Software:
Software:
int servoval = 0; VARIÁVEL servo
int tmp = 1500; VARIÁVEL fixa de temporização
int randomval2 = 0; VARIÁVEL tempo de pausa
#include < Servo.h > / / biblioteca servo
Coruja del servo; creando o objeto coruja
Servo bruxa; creando o objeto bruxa
Servo voando; creando o objeto voando
void setup () {/ / configurar
Coruja.Attach (0); atribuindo una coruja ao pino 0
Bruxa.Attach (1); atribuindo una bruxa ao pino 1
voando.Attach (2); atribuindo o voando ao pino 2
}
void loop () {}
randomval2 = random (4); VARIÁVEL para Selecione o tempo de pausa
randomval2 = randomval2 * 1000; ajustando o tempo para segundos: 0, 1 o 2 segundos
para (servoval = 0; servoval < 180; servoval += 1) {}
Coruja.Write (servoval);
Delay(15);
}
para (servoval = 180; servoval > = 1; servoval-=1) {}
Coruja.Write (servoval);
retardo (15);
}
retardo (randomval2 + 1000);
para (servoval = 0; servoval < 90; servoval += 1) {}
Bruxa.Write (servoval);
Delay(15);
}
para (servoval = 90; servoval > = 1; servoval-=1) {}
Bruxa.Write (servoval);
retardo (15);
}
bruxa int = bajo;
retardo (randomval2 + 1000);
para (servoval = 0; servoval < 180; servoval += 1) {}
voando.writeMicroseconds (1550);
retardo (tmp);
}
voando int = bajo;
retrasar (randomval2 + 1000);
}












