Paso 4: Mi diseño y concepto
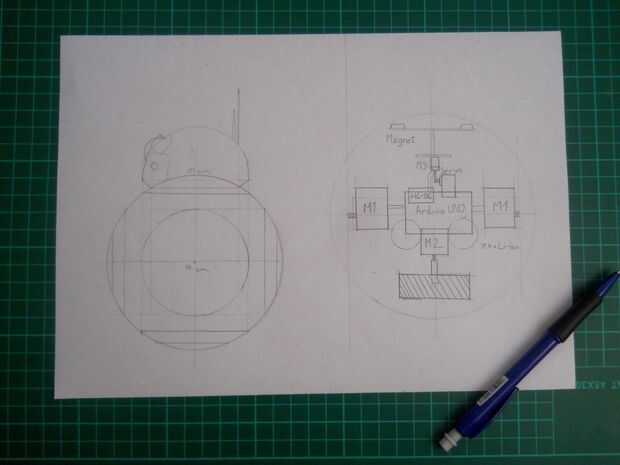
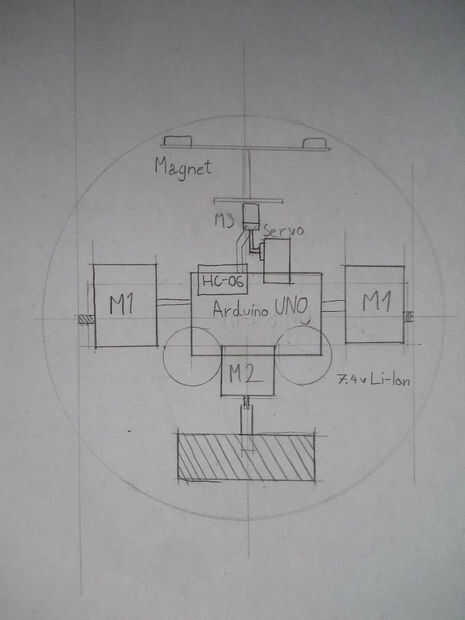
Hice algunos dibujos sobre mi plan. Usé un globo de cartulina para la cabeza y una bola de hamster plástico para hacer que el cuerpo. En este hámster bola se coloca el Arduino y los motores. El M1 (motor) se mueve el droide hacia adelante y hacia atrás, la M2's función es girar el cuerpo izquierdo o derecho. A la M2 se debe conectar algo de metal o cualquier cosa que tiene gran peso, lo contrario al droide no será capaz de girar a la izquierda o derecha. Como un peso simplemente usé las dos baterías, para no añadir peso extra. Más adelante explicaré este featurette. El Servo mueve la cabeza en el avance del cuerpo y hacia atrás y el M3 da vuelta la cabeza izquierda o derecha. El cabezal puede fijarse al droide con imanes.
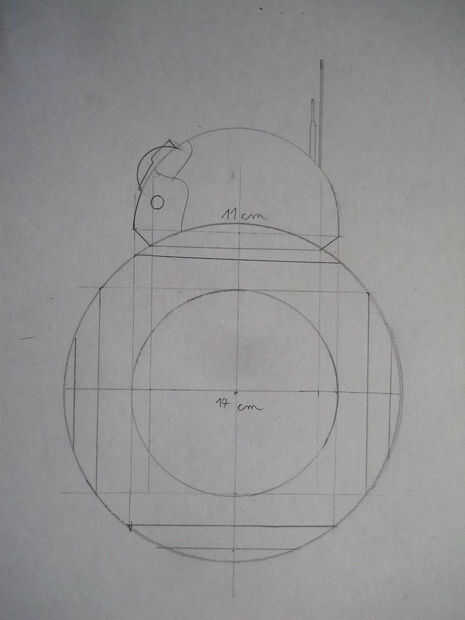
El tamaño del diámetro de la bola más grande es de 17 centímetros. La menor media bola es una bola de cartón que diámetro es de 11 centímetros.

, App MangoCube y Arduino UNO")


 con Arduino UNO")
")





 bricolaje teléfono soporte Universal con sólo tres Clips de la carpeta")
")
