Paso 5: cableado
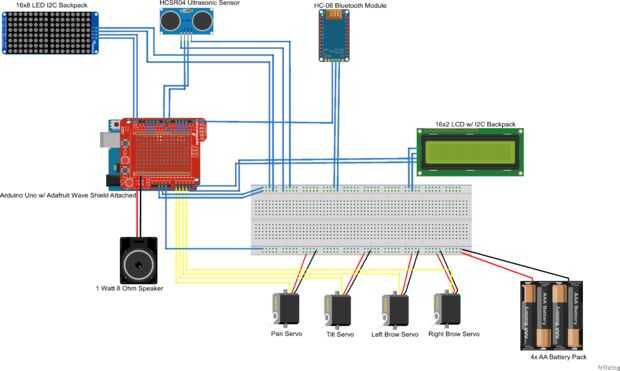

Puesto que este robot tiene tantos componentes que trabajan juntos en un recinto relativamente pequeño, el cableado puede conseguir un poco peludo como se puede ver.
Esto puede prevenirse mediante el uso de cables de puente más pequeño y algunas prácticas de manejo de cable. Terminé usando cinta aislante amontonan grupos de cables y evitar el "nido de pájaro" ver.
Energía
Sólo usé los carriles de alimentación protoboard en mi diseño. Necesitaba dos carriles de alimentación diferentes: uno para la alimentación del servo de cuatro y el era alimentar el Arduino para todo lo demás. Los servos deben ser alimentados por separado porque dibujan más tensión que el arduino pueden suministrar. Estoy usando 4 baterías del AA (4 x 1,5 = 6 V) para los servos.
El carril de tierra para la alimentación del servo debe estar conectado a Gnd de Arduino para los servos funcionan correctamente!
PANTALLA LCD
La pantalla estoy usando vino con una mochila de I2C que reduce la cantidad de pines que se requiere para sólo dos: SDA y SCLK, que están conectados a los pines A0 y A1. Los otros dos cables son de Vdd y GND.
Protector de la onda
El protector de la onda se encuentra en la parte superior el Arduino al igual que cualquier otro escudo. Utiliza pernos de 2, 3, 4, 5, 10, 11, 12 y 13.
Módulo de Bluetooth
El módulo de bluetooth tiene Vdd, Gnd y un pin de transmisión que debe ser conectado al pin de recepción (RX) 0 en el Arduino. Es como manda datos a Arduino para controlar Brobot.
Sensor HC-SR04
El sensor ultrasónico tiene Vdd, Gnd, gatillo y echo los pernos. Los pernos de disparo y el eco se utilizan para calcular la distancia y están conectados a los pines 7 y 8 en el Arduino.
8 x 8 LEDs
Las pantallas LED son ambos conectadas a la misma mochila que toma todos los 32 pines y consolida en una interfaz I2C. Esto es un ahorro enorme pin, y ambas matrices terminan ocupando sólo los pines SDA y SCLK en el Arduino. Esta mochila también tiene Vdd y Gnd los cables.
Servos
Cada servo se conecta en el riel de alimentación servo a través de Vdd y GND. pernos A5 - A2 son para Pan, Tilt, frente de izquierda y derecha frente líneas de datos. Tuve que usar una biblioteca de SoftServo estos servos para trabajar en estos pines (explicados más en la sección de código).
Altavoz
El altavoz tiene dos cables conectados a los dos pines justo detrás el Headphone jack en el protector de la onda. No tienen nombre, y no importa cual cable de altavoz está conectado a que pin.



")







")

 IR + consejos")