Paso 4: código
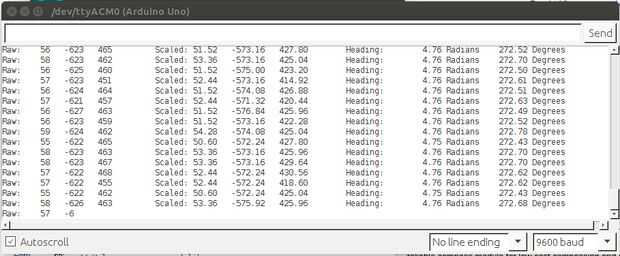
El código es bastante sencillo y todo lo que hace es Lee las lecturas de la brújula y se imprime en un monitor de la serie. La brújula se calibra para que unos segundos cuando se ejecuta el código hace que no gire o perturbar la brújula y esto sucede después de que termina deben recibir un buen flujo de datos del sensor.
<p>// Reference the I2C Library<br>#include <wire.h> // Reference the HMC5883L Compass Library #include <hmc5883l.h></hmc5883l.h></wire.h></p><p>// Store our compass as a variable. HMC5883L compass; // Record any errors that may occur in the compass. int error = 0;</p><p>// Out setup routine, here we will configure the microcontroller and compass. void setup() { // Initialize the serial port. Serial.begin(9600);</p><p> Serial.println("Starting the I2C interface."); Wire.begin(); // Start the I2C interface.</p><p> Serial.println("Constructing new HMC5883L"); Serial.println("Setting scale to +/- 1.3 Ga"); error = compass.setScale(1.3); // Set the scale of the compass. if(error != 0) // If there is an error, print it out. Serial.println(compass.getErrorText(error)); Serial.println("Setting measurement mode to continous."); error = compass.setMeasurementMode(MEASUREMENT_CONTINUOUS); // Set the measurement mode to Continuous if(error != 0) // If there is an error, print it out. Serial.println(compass.getErrorText(error)); }</p><p>// Our main program loop. void loop() { // Retrive the raw values from the compass (not scaled). MagnetometerRaw raw = compass.readRawAxis(); // Retrived the scaled values from the compass (scaled to the configured scale). MagnetometerScaled scaled = compass.readScaledAxis(); // Values are accessed like so: int MilliGauss_OnThe_XAxis = scaled.XAxis;// (or YAxis, or ZAxis)</p><p> // Calculate heading when the magnetometer is level, then correct for signs of axis. float heading = atan2(scaled.YAxis, scaled.XAxis); // Once you have your heading, you must then add your 'Declination Angle', which is the 'Error' of the magnetic field in your location. // Find yours here: http://www.magnetic-declination.com/ // Mine is: -2��37' which is -2.617 Degrees, or (which we need) -0.0456752665 radians, I will use -0.0457 // If you cannot find your Declination, comment out these two lines, your compass will be slightly off. float declinationAngle = -0.0457; heading += declinationAngle; // Correct for when signs are reversed. if(heading < 0) heading += 2*PI; // Check for wrap due to addition of declination. if(heading > 2*PI) heading -= 2*PI; // Convert radians to degrees for readability. float headingDegrees = heading * 180/M_PI; </p><p> // Output the data via the serial port. Output(raw, scaled, heading, headingDegrees);</p><p> // Normally we would delay the application by 66ms to allow the loop // to run at 15Hz (default bandwidth for the HMC5883L). // However since we have a long serial out (104ms at 9600) we will let // it run at its natural speed. delay(66);//of course it can be delayed longer. }</p><p>// Output the data down the serial port. void Output(MagnetometerRaw raw, MagnetometerScaled scaled, float heading, float headingDegrees) { Serial.print("Raw:\t"); Serial.print(raw.XAxis); Serial.print(" "); Serial.print(raw.YAxis); Serial.print(" "); Serial.print(raw.ZAxis); Serial.print(" \tScaled:\t"); Serial.print(scaled.XAxis); Serial.print(" "); Serial.print(scaled.YAxis); Serial.print(" "); Serial.print(scaled.ZAxis);</p><p> Serial.print(" \tHeading:\t"); Serial.print(heading); Serial.print(" Radians \t"); Serial.print(headingDegrees); Serial.println(" Degrees \t"); }</p>
")
")

")


")



 con frambuesa Pi 2 con Python3")


