Paso 8: Conectar el Arduino
y fije la caja del kit al marco - con tornillos, cerraduras de cremallera o su favorito vinculación técnica.
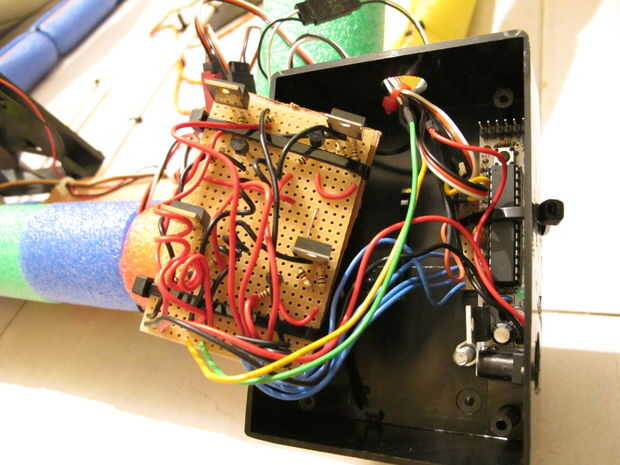
Perforaciones para los cables de salida y voltaje vienen en.
Aseguró el Arduino dentro de la caja y perforó un agujero junto al terminal de CC de la BRD. Que resultó conveniente.
Conectar los periféricos con la siguiente configuración :
buscar pin de interruptor de límite
const int switchPin = 2;
extensión de brazos servo pin
const int servoPin = 3;
perno ventilador de la fuente
const int fanPin = 4;
Conecte el motor, el interruptor y el servo al Arduino.
utilizar los cables de extensión de 3 hilos, o cualquier otro cable que te gusta.
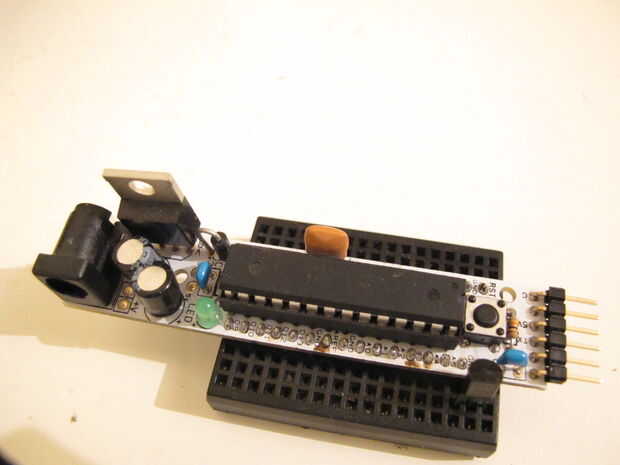
Durante la creación de un prototipo utiliza una pequeña matriz como la de la segunda foto, después soldó la BRD en un PCB similar al que usé para el puente de H.
Cuando se trabaja con PCB que recomiendo, desconexión de conductividad es fácil de hacer por perforación suavemente el cobre hacia fuera (utilizar taladro de 3mm) y eliminación de residuos en esa línea con una buena cuchilla.
Conecte el ventilador a través de un transistor reinstalación u otro Darlington
Ver aquí documentación seria o aquí para la versión más corta de la misma.
Usa a se contrae para proteger los terminales del transistor cierre circuito con cualquier cosa cuando se aprieta dentro de la caja del kit.
Cargar el software adjunto en el Arduino y el funcionamiento en seco
Modificar los valores límite del servo, dependiendo del tipo de servo y el arreglo físico
Sí, me refiero a este código:
Valores límites de servo
const int min_pos = 85;
const int max_pos = 127;


")








")

