Paso 5: Cableado y componentes electrónicos


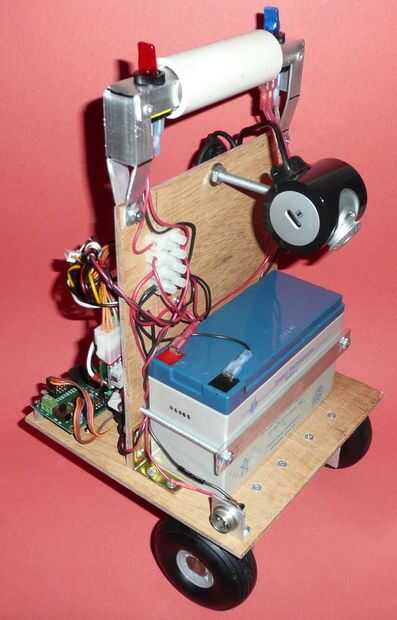

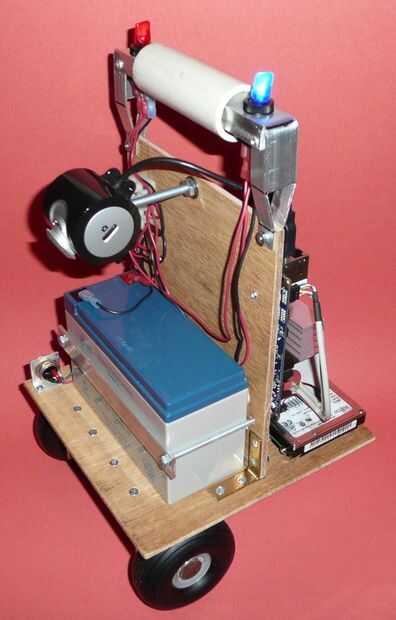
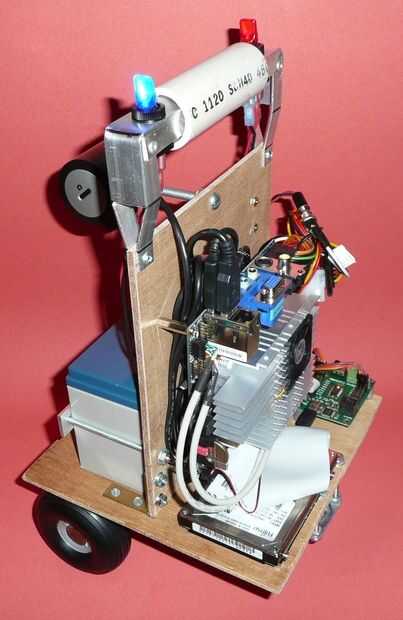
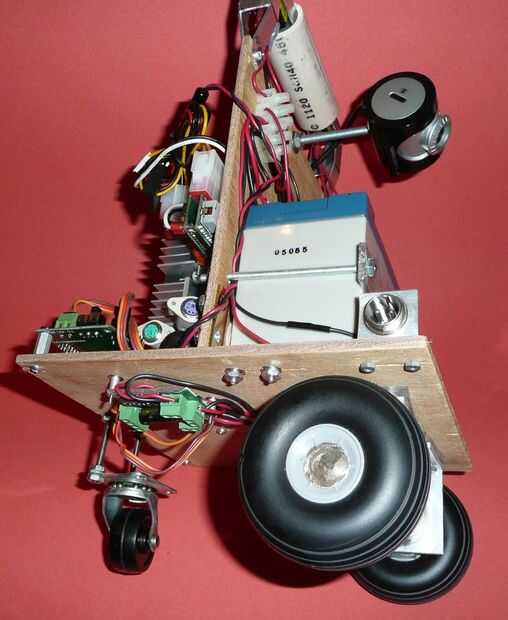
Para las interconexiones de energía, se utilizó una fila 4 Regleta Europea - fue suficiente para que la computadora y los interruptores de potencia del motor. El equipo utiliza una fuente de alimentación de 12v, así que era conveniente que el equipo y los motores utilizan la misma tensión. Para la batería de carga, que fueron utilizados un micrófono enchufe y zócalo - parecen funcionar bien y son codificados para evitar conectarlos al revés. La batería es una celda de gel hora 12v 7 amp. Un cargador para la batería fue modificado con el enchufe del micrófono.
En las fotos, puedes ver cómo se montó el disco duro. Junto al disco duro es el tablero de control de servo serie. En este caso, fue uno de paralaje, que es apoyado por RoboRealm, el software utilizado para programar este robot. Por debajo de la plataforma, un Sabertooh de ingeniería de dimensiones 2 x 5 fue utilizado con R/C control de la SSC de paralaje.













