Paso 2: Fundamentos de BUGBot



1 sensor de x LDR derecha
1 sensor de x LDR izquierda
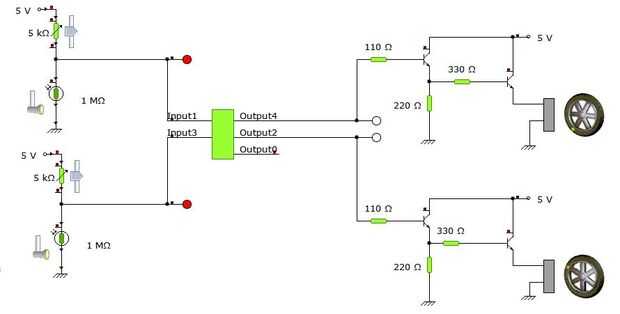
En nuestro BUGBot, utilizamos motores de corriente continua para controlar el sistema de transmisión (caja de engranajes y las ruedas) para que el robot puede moverse y así seguir la luz del incidente en los sensores.
Se utilizó la caja de cambios Tamyia en la 58:1 de la relación
Si el LDR izquierdo tiene luz incidente, debe encenderse el motor DC adecuado al robot gire o mueva a la izquierda.
Si el LDR derecho tiene luz incidente, debe encenderse el motor de la C.C. izquierdo al robot gire o mueva a la derecha.
Si ambos LDRs tienen luz incidente ambos motores de la C.C. deben activarse al robot a avanzar.
Si ambos LDRs no tienen ninguna luz incidente, bot DC motores deben estar apagados al robot permanecen inmóviles.
Nota importante:
No es suficiente sólo para detectar la presencia de la luz en los sensores y conduce los motores encendido, los motores también deben mantener alimentados por una cantidad de tiempo para la operación mínima.
El control dispositivos LDR sensores y motores, se hará con el software de Arduino para ejecutar exactamente los pasos anteriores.
Para el conductor del motor (como debe girar sólo en una dirección), no es necesario utilizar un puente H, podemos hacer el conductor del motor usando solo transistores de Darlington.






")




 Básicos Arduino Robot buscador de luz!")
