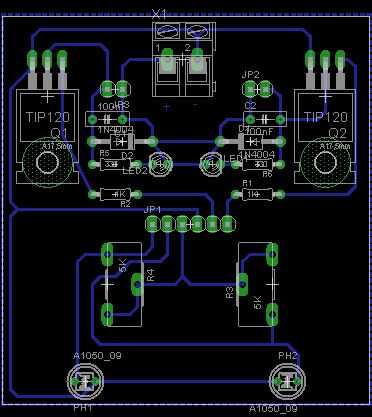
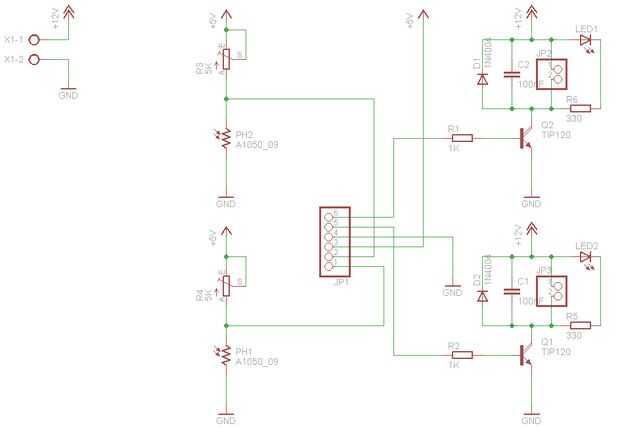
Paso 3: Diagrama esquemático y junta la disposición
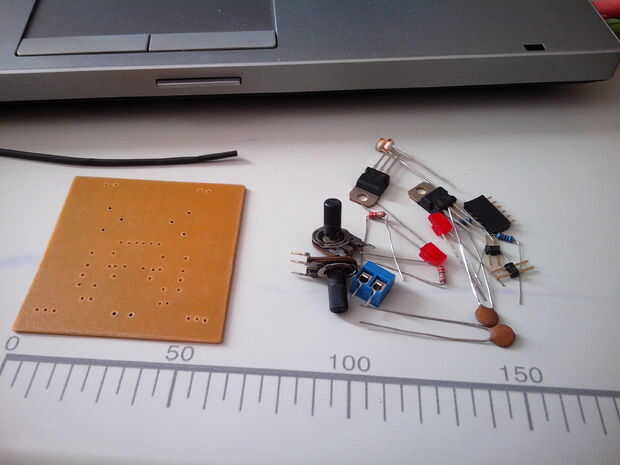
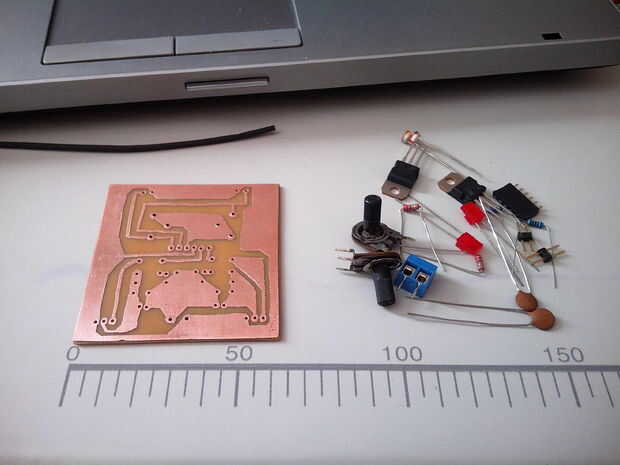

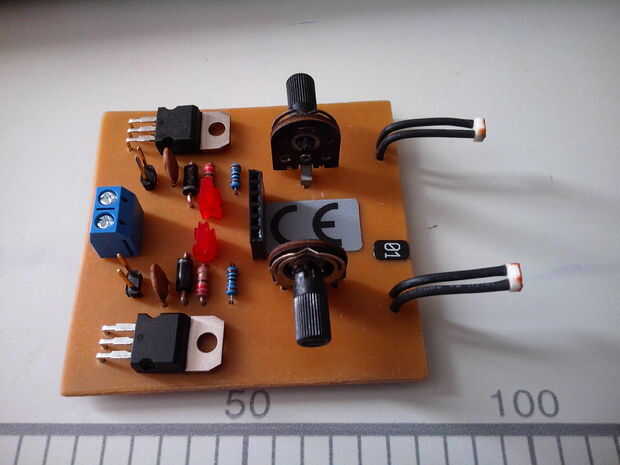
2 transistores x, TIP120
Diodos 1N4001 x 2
LEDs de 2 x 3mm verde
2 x LDRs
resistencias de 2 x 1KΩ
resistencias de 2 x 470Ω
condensadores de 2 x 100 nF
2 x 5KΩ trim-pot
1 x 2 conectores AK300
2 x2 cabeza de alfiler
1 x6 cabeza de alfiler
1 x batería (9V o 12V)
Tenga en cuenta que:
Los diodos 1N4001 y condensadores de 100nF son para supresión de ruido y protección de circuito.
Tenemos LED verde para indicar que si un motor está activado o no (cuidado con el valor de la resistencia, si se utiliza una tensión superior a 6V. Te aconsejo usar 6V/270Ω, 9V / 470Ω, 12/680Ω.
JP2 es la salida para el motor DC adecuado y JP3 es salida para el motor de la C.C. izquierdo.
JP1 es la conexión con arduino, como abajo
Pin 1 = > sensor LDR - izquierda;
Pin 2 = > sensor LDR - derecha;
PIN 3 = > potencia lógica, a los sensores (+ 5V de Arduino);
Pin 4 = > común negativo de Arduino y DC motores de etapa de potencia;
pin 5 = > comando a la izquierda DC motor (viene de arduino);
PIN 6 = > comando conducir la derecha DC motor (viene de arduino).
Más adelante haremos un paralelo entre los pines del Arduino y de JP1.
Hemos visto que los sensores utilizan la fuente de alimentación de arduino directamente.
Cuando tenemos luz incidente sobre la LDR, tenemos 0V en el pin del Arduino y cuando no tenemos luz incidente sobre la LDR, tenemos 5V en el pin del Arduino (es la lógica inversa utiliza a la DC control motores).
Ajuste de la sensibilidad:
Realiza a través de la 5KΩ trim-pots, de esta forma que podemos ajustar el nivel de luz en la que queremos el BUGBot responderán y funcionar los motores de C.C. para su movimiento.
A continuación los archivos originales en Eagle:
http://www.4shared.com/file/K-dFSSPS/BugBot.html
http://www.4shared.com/file/XBHJe0QI/BugBot.html
Conexión de Arduino:
Izquierda LDR = > A0
Derecho LDR = > A1
Motor de la C.C. de izquierda = > 8
Motor de la C.C. de la derecha = > 9
Conexiones entre el Arduino y JP1 conector:
ARDUINO a JP1-x
A0 - JP1-1
A1 - JP1-2
+ 5 V - JP1-3
GND - JP1-4
D8 - JP1-5
D9 - JP1-6






")




 Básicos Arduino Robot buscador de luz!")
